शृंखला, यांत्रिक : एका बिंदूपाशी असलेल्या गतीचे अपेक्षित रीतीने दुसऱ्या बिंदूपाशी प्रेषण किंवा संक्रमण करण्यासाठी वापरण्यात येणाऱ्या यंत्रणेला यांत्रिक शृंखला म्हणतात. यासाठी शृंखलेत दुवे, भ्रमणाग्र तसेच सरकते व परिभ्रमी घटक एकत्रितपणे वापरलेले असतात. अशा रीतीने यांत्रिक शृंखलेत दृढ (अनम्य) दंड खिळींनी किंवा तत्सम प्रयुक्त्यांनी जोडलेले असतात उदा., सरकत्या खिळींनी जोडलेले कमी-जास्त लांबीचे दंड. दुवे जोडलेले असल्याने आदान दुव्याच्या गतीने प्रदान दुव्याची गती ठरते. ही प्रदान गती सरळ वापरता येते अथवा प्रदान दुव्याला दुसरा यंत्रभाग जोडून तिचा असाच उपयोग करून घेता येतो. दुव्यांची परिमाणे (मापे) बदलून अथवा साध्या शृंखलांच्या जोडणीने संयुक्त शृंखला तयार करून असंख्य प्रकारच्या गती उपलब्ध होऊ शकतात आणि यांत्रिक अभियांत्रिकीमधील अनेक कामांसाठी त्या वापरता येतात. सामान्यपणे यांत्रिक शृंखला पोलादी असतात व यंत्रसामग्रीला अनुसरून त्यांचे वेगवेगळे प्रकार तयार करतात.
मूलभूत दुवे : परिभ्रमण, दोलन (आंदोलनात्मक) व पश्च-अग्र (पुढे-मागे होणारी) या आदान व प्रदान गती सामान्यपणे यांत्रिक शृंखलांशी निगडित असतात. या गती मिळविण्यासाठी यांत्रिक शृंखलेत तरफा, भुजा व सरकते घटक हे मूलभूत दुवे वापरलेले असतात. दुवा हा सरळ दंड, तबकडी किंवा इतर कोठल्याही साध्या वा गुंतागुंतीच्या आकाराचा असतो. मात्र त्यांचे अंतिम (फलित) कार्य एकच असते. सामान्यपणे दुवा हा दृढ द्रव्याचा असतो, म्हणजे त्याचा आकार बदलत नाही अथवा त्याच्यावरील बिंदूंमधील अंतर बदलत नाही.
दंड हा सरळ रेषेचा खंड वा वक्राचा एक भाग मानता येतो आणि भ्रमणाग्र हे जोडलेल्या दंडांवरील सामायिक बिंदू असल्याचे म्हणता येते. स्थिर आधाराला तसेच एका वा अधिक दुव्यांना जोडलेल्या दंडाला भुजा म्हणतात. तरफ म्हणजे दुसऱ्या तीन दुव्यांना जोडलेला दंड असल्याचे सामान्यपणे मानता येते. तरफेच्या लांबीच्या तुलनेत तिच्या टोकांचे होणारे विस्थापन अल्प असल्याचे गृहीत धरता येते. रेषीय विस्थापनांचे वा प्रेरणांचे वर्धन किंवा क्षीणन करण्यासाठी स्थिर भ्रमणाग्र असलेल्या तरफा अतिशय उपयुक्त असतात. तरफ एका स्थिर बिंदूभोवती फिरते. ती एका कोनातून दोलन करते व ठरावीक कालावधीनंतर या दोलनाची दिशा उलट होते. सरकता घटक दुसऱ्या दुव्याच्या पृष्ठभागावर सरळ वा वक्र रेषेत पश्चाग्र गतीने (स्थिर खाचेत) हलतो. दुवे एकमेकांना जोडणाऱ्या दृढ घटकांना सांधे वा जोड म्हणतात. पिन सांधा, सरकत्या घटकाचा सांधा, सिलिंडर सांधा, गोलक सांधा, स्क्रू सांधा हे सर्वांत सामान्य सांधे आहेत. प्रत्येक सांध्यालगत दोन दुवे एकत्र आल्याने प्रत्येक दुव्याचा एकेक घटक मिळून सांधा हे युग्म (जोडी) बनते. अशा रीतीने दुवा हा भिन्न युग्मांमधील दोन किंवा अधिक घटकांचा पक्का संयोग असतो.
शृंखलांचे पृथक्करण : शृंखलेतील एक दुवा स्थिर असतो, म्हणजे तो शृंखलेच्या चौकटीच्या संदर्भात हलत नाही. अर्थात खुद्द चौकट यंत्रणेच्या किंवा यंत्राच्या दुसऱ्या भागाच्या संदर्भात हलू शकते. जमिनीला गती नसते म्हणजे ती स्थिर आहे, असे येथे गृहीत धरतात. यामुळे जमिनीत पक्का केलेल्या दुव्याला स्थिर दुवा म्हणतात. हलत्या चौकटीच्या संदर्भात स्थिर असलेल्या दुव्यालाही स्थिर दुवा म्हणतात उदा., मोटारगाडीच्या साट्यावर पक्के बसविलेले इंजिन.
शृंखलेच्या आकृतीत गतीच्या प्रतलाच्या लंब दिशेतील दुव्याची जाडी किंवा आकार दाखवीत नाहीत. म्हणजे यंत्रभागाचा आकार कोणताही असला, तरी दुवे रेषांनी दर्शवितात. अशा आकृतींना केवलगतिक रेखाकृती म्हणतात. शृंखलेतील घटकांची वेग, प्रवेग, धक्के यांसारखी गुणवैशिष्ट्ये तसेच कोणत्याही दुव्यावरील बिंदूंनी अनुसरलेले मार्ग यांचे मूल्यमापन करण्यासाठी या आकृत्यांचा उपयोग करतात.
चतुर्दंडी शृंखला : ही सर्वांत साधी शृंखला आहे. कारण तीन घटक वा दंड जोडून बनलेली बंदिस्त प्रणाली निश्चित त्रिकोणी आकाराची व म्हणून दृढ रचना असते. चतुर्डंडी आणि चार घटकांच्या इतर शृंखलांना साध्या शृंखला म्हणतात. चारहून अधिक दुव्यांच्या शृंखलांना अथवा शृंखलांच्या संयोगांना संयुक्त शृंखला म्हणतात.
स्थिर दुवा, चालक दुवा, चलित (चालविला जाणारा) दुवा आणि चालक व चलित दुव्यांदरम्यानचा त्यांना जोडणारा युग्मक दुवा हे चतुर्दंडी शृंखलेचे घटक असतात. योग्य प्रमाणनिश्चिती व दुव्यांच्या सापेक्ष स्थानांची अचूक निवड यांद्वारे चतुर्दंडी शृंखला वापरून चालक व चलित दुव्यांदरम्यानच्या जवळजवळ अनंत प्रकारच्या गती उपलब्ध होऊ शकतात. या मूलभूत शृंखलेत दुसरा दुवा स्थिर करून सुधारणा केली, तर या दोन शृंखलांना एकमेकींचे विपर्यय (व्युत्क्रम) म्हणतात. विपर्ययी शृंखलेत सर्वसाधारणपणे आदान व प्रदान या दोन्ही गतींमध्ये बदल होतो, मात्र तिच्यातील दुव्यांची सापेक्ष गती बदलत नाही.
आकृती १ मधील चतुर्दंडी शृंखलेत एक दुवा (१) स्थिर असून हिला ‘भुजा व दोलन शृंखला’ म्हणतात. जेव्हा चालक दुवा (२) एकसम गतीने घड्याळातील काट्यांप्रमाणे सव्य परिभ्रमण करतो, तेव्हा युग्मक दुव्याद्वारे (३) चलित तरफ (दुवा – ४) घटत्या गतीने पुष्कळच कमी कोनातून फिरविली जाते. दुवा–२ ची दिशा बदलल्यास किंवा त्याचे परिभ्रमण पुढे चालू राहिल्यास दुवा–४ ची दिशा उलट होते. याचा परिणाम म्हणजे जेव्हा भुजा (दुवा–२) फिरते, तेव्हा दुवा–४ ला दोलन गती मिळते. अशा रीतीने चतुर्दंडी शृंखलेत परिभ्रमण गतीचे आंदोलनात्मक गतीत किंवा याच्या उलट रूपांतर होते.
आकृती १ मधील दुवा–१ ऐवजी दुवा–२ स्थिर असल्यास ‘भुजा व दोलन शृंखले’चा विपर्यय तयार होतो (आ. २), त्याला ‘ओढ शृंखला’ म्हणतात. या ओढ शृंखलेत चालक (३) व चलित (१) हे दोन्ही दुवे अखंडपणे परिभ्रमण करतात.
वर उल्लेखिलेल्या चतुर्दंडी शृंखलेच्या दुसऱ्या विपर्ययांत दुवा–३ स्थिर केल्यास दोलन व भुजा शृंखलेचा दुसरा प्रकार उपलब्ध होतो आणि दुवा–४ स्थिर केल्यास दुवा–१ व दुवा–३ यांचे परिभ्रमण न होता दोलन होते. चतुर्दंडी शृंखलेतील एकाआड एक असलेले दुवे सारख्या लांबीचे असल्यास समांतर गती शृंखला तयार होते (आ. ३). अनुरेखनात समांतर रेषा काढण्यासाठी वापरण्यात येणाऱ्या साधनात हेच तत्त्व वापरलेले असते. वाफेवर चालणारे स्वयंचलित वाहन हे या शृंखलेचे उदाहरण असून त्याची चाके दुवा-२ व दुवा-४ शी तुल्य असतात.
सरकता घटक-भुजा शृंखला : हिच्या सर्वांत साध्या प्रकारात स्थिर दुवा (१), चालक दुवा (२), चलित सरकता घटक (४) आणि भुजा व स्थिर खाचेत हलणारा सरकता घटक यांना जोडणारा युग्मक दुवा (३) हे घटक असतात (आ. ४). आदान परिभ्रमी (वर्तुळाकार) गतीचे सरळ किंवा वक्र रेषीय पश्चाग्र प्रदान गतीत अथवा याउलट परिवर्तन करण्यासाठी ही शृंखला वापरतात. संपीडक (दाब देणारे यंत्र), पंप किंवा मोटारगाडीचे (स्वयंचल) इंजिन यांचे ही शृंखला म्हणजे रेषीय व रेखाकृती निदर्शन असते. ही शृंखला चतुर्दंडी शृंखलेवढीच महत्त्वाची असून ती आ. १ मधील चतुर्दंडी शृंखलेचा एक विपर्यय आहे. या विपर्ययात दुवा–१ व दुवा–४ यांची लांबी अनंत असून यामुळे सरकत्या घटकाची सरळ रेषेत हालचाल होते. दुवा–२ च्या तुलनेत दुवा–३ ची लांबी खूप जास्त असल्यास सरकत्या घटकाला जवळजवळ हरात्मक (एकच कंप्रता असलेली आवर्ती) गती प्राप्त होते. सिलिंडरातील दट्ट्या हा सरकता घटक असलेल्या पश्चाग्र गती इंजिनातील शृंखला ही सर्वपरिचित सुधारित चतुर्दंडी शृंखला आहे. उलट परिभ्रमण गतीचे सरल हरात्मक गतीत रूपांतर करण्यासाठी स्कॉच योक वापरतात.
चतुर्दंडी व सरकता घटक-भुजा शृंखलांचा संयोग करणे पुष्कळदा इष्ट ठरते. उदा., विविध दाबयंत्रे व दलित्रे यांत वापरण्यात येणारी तरफी स्विच यंत्रणा ही सहा दुव्यांची प्रणाली (शृंखला) आहे (आ.५). येथे दुवा–६ (दाबयंत्र) हा दुवा-१ वर सरकू शकतो. या दोन शृंखलांच्या सांध्यापाशी अल्पशी प्रेरणा लावल्यास म्हणजेच दुवा–४ व ५ यांच्यावर प्रेरणा लावली जाईल अशा रीतीने दुवा–२ फिरविल्यास दुवा–६ द्वारे (दाबयंत्राद्वारे) अधिक मोठी प्रेरणा लावता येते.
इतर शृंखला : शृंखलांमार्फत असंख्य गती निर्माण होऊ शकतात. अशा काही शृंखलांची माहिती पुढे दिली आहे. जलद माघारी (येणारी) यंत्रणा विविध यांत्रिक हत्यारांत वापरतात. अशा यंत्रणेत चतुर्दंडी व घसरता घटक–भुजा शृंखलांचा संयोग केलेला असतो. पँटोग्राफ (पंजा) या साधनाची रचना अशी असून यातील चार दुव्यांचा मिळून समांतरभुज चौकोन बनतो. पाच दुव्यांची ही यंत्रणा रेखाकृती लहान वा मोठी करण्यासाठी वापरतात. आकृती ६ मधील प बिंदू दिलेल्या मार्गाने हलतो तेव्हा ट बिंदू त्याचे अनुसरण करून तीच लहान आकृती वा वक्र रेखाटतो. शृंखलांची सापेक्ष परिमाणे बदलून वर्धित (मोठी) किंवा लघुकृत (लहान) रूपातील आकृतीचे रेखाटन करता येते.
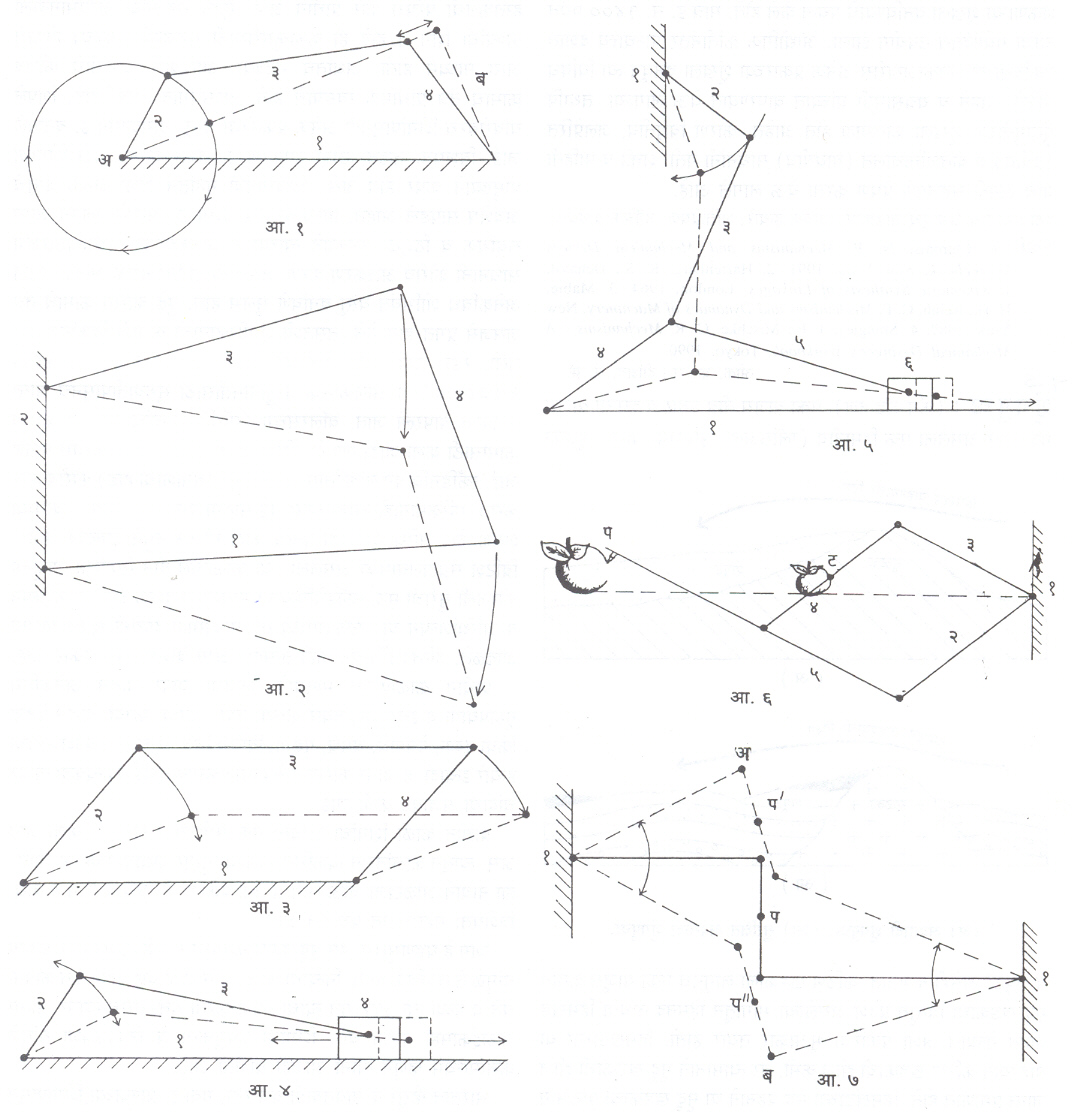
सरळ रेषेतील गती उपलब्ध करून देण्यासाठी औद्योगिक क्रांतीच्या सुरुवातीच्या काळात अनेक शृंखलांची रचना करण्यात आली होती. उदा., चार वा अधिक दंड एकमेकांना जोडून बनविलेल्या शृंखलेद्वारे सरळ गती निर्माण करून गतीचे संक्रमण वा प्रेषण करण्यासाठी पफ्नूट्यई ल्यूव्हॉव्ह्यिच चेबिशॉव्ह (१८२१–१८९४) या रशियन गणितज्ञांनी प्रयत्न केले. अशा प्रकारे तीन दंडांची शृंखला वापरून त्यांनी सरळ गती निर्माण केली. तिला चेबिशॉव्ह समांतर गती म्हणतात. जोसेफ व्हिटवर्थ (१८०३–१८८७) यांनी सहा दुव्यांची यंत्रणा प्रथम तयार केली. तिच्यामुळे आंदोलनात्मक रेषीय गती असलेल्या वस्तूची पश्चगामी चाल अग्रगामी चालीपेक्षा अधिक जलद होते. स्कॉटिश अभियंते जेम्स वॉट (१७३६–१८१९) यांनी जवळजवळ सरळ रेषेतील गती निर्मिणारी यंत्रणा तयार केल्याने दुहेरी क्रियेचे वाफ इंजिन तयार करता आले. या इंजिनात एकच दट्ट्या असून त्याची खालच्या दिशेतील व उलटी अशा दोन्ही चालींनी कार्य केले जाते (आ. ७). म्हणजे दट्ट्याचा दंड ज्या प बिंदूला जोडला आहे, तो बिंदू अ आणि ब या मर्यादांदरम्यान जवळजवळ सरळ रेषेत मागेपुढे (प‘ प प”) हलतो. यानंतर रचलेल्या विविध शृंखलांमार्फत खरी सरळ रेषीय गती मिळू लागली.
त्रिमितीय शृंखला : वर एकाच प्रतलातील गती असलेल्या शृंखलांचे विवरण आले आहे. या सर्व शृंखलांमधील दुव्यांतील सर्व बिंदू एकाच किंवा समांतर प्रतलांत हलतात. उलट त्रिमितीय (अवकाशीय) शृंखलांद्वारे स्थानांतरणाच्या तीन व परिभ्रमणाच्या तीन अशा एकूण सहा मुक्तता मात्रा उपलब्ध होतात. त्या सहजपणे दर्शविता किंवा कल्पिता येत नाहीत. अशा शृंखलांचे विशेषीकृत उपयोग अनेक वर्षे होत आहेत. मात्र २००० सालाच्या सुमारास त्यांचे पृथक्करण व संश्लेषण करण्यात येऊ लागले. स्वयंचल यंत्रांमध्ये वापरण्यात येणारा सर्वकामी जोड हे यांचे बहुधा सर्वाधिक परिचित उदाहरण असून त्याला हुक जोड किंवा वॉर्डन जोड असेही म्हणतात.
इ. स. पू. ४०० मध्ये शृंखला वापरण्याचा विचार झाला होता. आर्किमिडीझ, ॲलेक्झांड्रियाचे हीरो, लिओनार्दो दा व्हींची इत्यादींनी जलद गतीच्या, लांब अंतरावरच्या कमीत कमी क्षेत्रात गुंतागुंतीच्या हालचाली करू शकणाऱ्या शृंखला बनविण्याचे प्रयत्न केले होते. मात्र इ. स. १४०० पर्यंत त्यांचा मर्यादितच उपयोग झाला. औद्योगिक क्रांतीनंतर पाश्चात्त्य देशांत एकविसाव्या शतकाअखेरीस अनेक प्रकारच्या शृंखला बनवून त्या विविध इंजिने, वाहने व यंत्रसामग्री यांच्यात वापरण्यात येऊ लागल्या. तथापि गुंतागुंतीच्या शृंखला कालबाह्य होत आहेत. कारण विद्युतीय, जलप्रेरित (द्रवीय) व वातशक्तिचलित (वायवीय) साधनांनी गती, शक्ती व माहिती यांचे अगदी सहजपणे प्रेषण करता येऊ लागले आहे.
पहा : धातु व अधातूंचे जोडकाम यांत्रिक हत्यारे शक्तिप्रेषण, यांत्रिक व द्रवीय.
संदर्भ : 1. Chironis, N. P., Mechanisms and Mechanical Devices Sourcebook, New York, 1991. 2. Hartenberg, R. S., Denavit, J., Kinematic Synthesis of Linkages, London, 1964. 3. Mabie, H. H., Reinh, C.F., Mechanisms and Dynamics of Machinery, New York, 1987. 4. Shingley, J. E., Mischke, C. R., Mechanisms : A Mechanical Designer’s Workbook, Tokyo, 1990.
ओक, वा. रा., दीक्षित, चं. ग.
आपल्या मित्रपरिवारात शेअर करा..