मार्गनिर्देशन: (नॅव्हिगेशन). एका स्थानापासून दुसऱ्या इच्छित स्थानी जाण्यासाठी मार्ग निश्चित करून त्या मार्गाने जाण्यासाठी वाहनाचे चालन करणे आणि अवश्य तेथे मार्गात बदल करून वाहन इच्छित स्थळी नेणे यास मार्गनिर्देशन असे म्हणतात.
मानव, पशू, इतर भूचर प्राणी, जलचर प्राणी व पक्षी यांस उदरभरण, ऋतूकालाप्रमाणे स्थानिक परिस्थितीत होणारे अहितकारक बदल, शत्रूंपासून उत्पन्न होणारे भय, प्रजोत्पादन व प्रजेची वाढ होण्यास सोयिस्कर स्थलाचा शोध, कुतूहल वगैरे कारणांमुळे एका स्थानापासून दुसऱ्या स्थानी ये-जा करणे इष्ट होते. हा प्रवास सुरक्षीत व सुखकर होऊन इच्छित स्थळी पोहचण्यास मार्गनिर्देशनाची आवश्यकता आहे.
मार्गनिर्देशनात पुढील मुख्य गोष्टीचा अंतर्भाव होतो : (१) कोणत्या स्थळापासून कोणत्या स्थळी जावयाचे हे प्रथम ठरविणे. (२) योग्य मार्गाची निवड : ही निवड करताना वाटेत येऊ शकणारे खडक, पर्वत, नद्या इ. नैसर्गिक अडथळे, राष्ट्रीय व आंतरराष्ट्रीय निर्बंध आणि आर्थिक मर्यादा यांचा विचार करावा लागतो. (३) प्रवासास योग्य वाहनाची निवड : ही निवड करताना वाहनाचा आकार व त्याचे आकारमान, वजन, वाटेत येणाऱ्या अडचणींतून पार पडण्याची क्षमता आणि प्रवासाच्या हेतूची सफलता होण्याची शक्यता यांचा विचार करावा लागतो. (४) प्रवासाच्या आरंभापासून वाहनाच्या वेगाचे (गती व दिशा यांचे) सतत निरीक्षन, मापन व नियंत्रण करणे, वेळोवेळी वाहनाची पृथ्वीवरील प्रत्यक्ष स्थाननिश्चिती करणे आणि अवश्य तर मार्गात व वेगात बदल करणे. (५) भूपृष्ठावरून येणाऱ्या संदेशांचे ग्रहण आणि वाहनातून करावे लागणारे संदेशांचे प्रेषण. (६) प्रवासात वाहनाची इतर वाहनांशी अथवा अडथळ्यांशी टक्कर होऊ नये यासाठी उपाययोजना.
इतिहास: प्रणिविज्ञानाप्रमाणे पृथ्वीवर जलचर प्रथम उत्पन्न झाले. जलचरांचे मार्गनिर्देशन पाण्याचे बदलणारे तापमान, पाण्यातील प्रवाहांची दिशा, प्रकाश, ध्वनी व गंध यांच्या साहाय्याने होते. भूपृष्ठावरील कीटक,सरपटणारे प्राणी व पशू यांचे मार्गनिर्देशन प्रकाश, ध्वनी, गंध व क्षेत्रचिन्हे (भूक्षेत्रातील स्थानदर्शक ठळक खुणा) यांच्या साहाय्याने होते. बहुतेक पक्ष्यांचे मार्गिनर्देशन पशूंप्रमाणेच होते पण ऋतुमानाप्रमाणे दीर्घ लांबीचे प्रवास करणाऱ्या पक्ष्यांचे मार्गनिर्देशन सूर्य, तारे यांची आकाशातील तात्कालीक स्थाने यांच्या साह्याने होत असावे, अशी कल्पना आहे. काही पक्षी चुंबकीय क्षेत्राचाही मार्गनिर्देशनासाठी उपयोग करीत असावेत, असे मानावयास जागा आहे. [→ प्राण्यांचे स्थलांतर].
पुढील विवेचनात केवळ मानवाच्या मार्गनिर्देशनाचा विचार केला आहे. मानव प्राथमिक अवस्थेत असताना गंध, ध्वनी, दृष्टिपथातील क्षेत्रचिन्हे व सूर्य, तारे यांची आकाशातील तात्कालिक स्थाने यांच्या साह्याने मार्गनिर्देशन करीत असे. इसवी सनाच्या आरंभी त्याला चुंबकीय गुणधर्म असलेल्या अयस्कांताच्या (मॅग्नेटाइट या खनिजाच्या एका प्रकारच्या) साहाय्याने दक्षिणोत्तर दिशा समजू शकते, याचा शोध लागला आणि त्याला अधिक दूरचा प्रवास करणे शक्य झाले. तो थोड्याच काळात नकाशे आणि तक्ते तयार करू लागला. पृथ्वीच्या गोल आकाराचे ज्ञान झाल्यावर तो नकाशावर अक्षांश व रेखांश निरनिराळ्या प्रक्षेपण पद्धती [→ प्रक्षेपण, नकाशाचे] उपयोजून दाखवू लागला. प्रवासात आपल्या तात्कालीक स्थानाचे अक्षांश प्रथम स्वस्तिक दंड या उपरणाने (एक लाकडी दंड आणि त्यावर लंब दिशेत बसविलेले व मुख्य दंडावर सरकविता येणारे एक वा अधिक लाकडी तुकडे यांनी बनलेल्या उपकरणाने) आणि नंतर ⇨ कोणादर्श या उपकरणाने त्याला त्वरित काढता येऊ लागले. रेडिओवरून संदर्भ वेळ (उदा., ग्रिनिच माध्य वेळ) कळू लागल्याने त्याला रेखांशही काढणे शक्य झाल्याने त्याला त्याचे भूपृष्ठावरिल तात्कालिक स्थान ठरविता येऊ लागले. आता निरनिराळ्या प्रकारांची रेडिओ उपकरणे, ⇨ लेसर, कृत्रिम उपग्रह यांच्या साहाय्याने वाहनाचे पृथ्वीवरील अथवा अवकाशातील स्थान निश्चित करता येते.
मानवास भूपृष्ठावरून, पाण्याच्या पृष्ठावरून अथवा खालून, हवेतून व अवकाशातून प्रवास करता येतो. त्यासाठी उपलब्ध वाहनांच्या प्रकारांत बरीच वाढ झाली आहे. भूपृष्ठावर व जलपृष्ठावर चालणारी वाहने एका प्रतलात म्हणजे द्विमितीय चालतात, पाणबुडे व विमाने त्रिमितीत चालतात, तर अवकाशयानाच्या चलनात चवथ्या म्हणजे कालमितीचाही विचार करावा लागतो. काही वाहने आकारमानाने व वजनाने प्रचंड असून वेगवान असतात व केवळ मानवी शरीर बलाने त्यांचे नियंत्रण शक्य होत नाही. त्यासाठी अनेक प्रकारची जटिल (गुंतागुंतीची) उपकरणे व साहाय्यक शक्तींचा उपयोग करावा लागतो आणि अशा वाहनांचे नियंत्रण हे एक वैज्ञानिक तंत्र बनले आहे. तशातच मानवरहित विमाने, रॉकेटे व अवकाशयाने वापरात येऊ लागल्याने आधुनिक काळात मार्गनिर्देशन करण्याच्या पद्धतींत तांत्रिक दृष्ट्या मोठी प्रगती झाली आहे आणि मार्गनिर्देशन कार्याचे स्वरूप फारच जटिल होऊन त्याच्या व्याप्तीतही वाढ झाली आहे.
पद्धती: मार्गनिर्देशन पद्धतीचे तीन मुख्य भाग आहेत असे कल्पून तिचे वर्णन करणे सोयीचे होते. यांपैकी पहिल्या भागात गतिमार्गाचे नियोजन केले जाते. दुसऱ्या भागात गतिमान वाहनाचे स्थान व वेग यांविषयीची माहिती मापन करून मिळवली जाते. तिसऱ्या भागात प्रत्यक्ष गतिमार्ग व नियोजीत गतिमार्ग यांत काही वेळा फरक पडू शकतो, असा फरक पडला आहे किंवा नाही, असल्यास त्याचे अपेक्षित परिणाम यांविषयी माहिती संकलीत केली जाते. या माहितीचा उपयोग करून नियंत्रण योजनेद्वारे वाहनाच्या गतीमध्ये आवश्यक ती सुधारणा घडवून आणता येते. यासाठी मार्गनिर्देशन या विषयाचे विवेचन करताना त्याबरोबरच मार्गदर्शन आणि वाहन नियंत्रण या त्याच्याशी निगडीत असलेल्या विषयांचाही विचार करावा लागतो. पुढील विवेचन याच विस्तृत पातळीवर केले आहे.
स्थाननिश्चिती : वाहनाचा गतिमार्ग ठरविण्यासाठी प्रवासाचे आरंभ स्थान व इच्छित अंतिम स्थान पक्के करावे लागते. भूपृष्ठावरील स्थानांची निश्चिती त्यांचे अक्षांश व रेखांश देऊन करता येते. प्रवासातील वाहनाच्या वेळोवेळीच्या स्थानांचे निर्देशन करण्याकरिता मार्गनिर्देशनाचे तक्ते व नकाशे बनविण्याची आवश्यकता वाटली. पृथ्वी गोलाकार असल्याने कोणती तरी प्रक्षेपणाची रीत वापरल्याविना निरनिराळ्या स्थानांचे कागदाच्या प्रतलावर निर्देशन करणे शक्य होत नाही. इ. स. पू. ६०० च्या सुमारास थेलीझ यांनी खमध्य ध्रुवीय त्रैज्य (किंवा गोमुखी व छायाशंकू) प्रक्षेपण पद्धतीचा उपयोग [→ प्रक्षेपण, नकाशाचे] केल्याचा उल्लेख मिळतो. नंतर प्रतल प्रक्षेपण पद्धतीचा उपयोग करून तक्ते केले जात पण त्यांच्या लांब प्रवासांच्या मार्गनिर्देशनास पुरेसा उपयोग होत नाही.
अचूक मार्गनिर्देशनाकरता प्रक्षेपणामुळे प्रतलावर होणारी विकृती कोणत्याही एका बिंदूपाशी सर्व दिशांस सारखी असली पाहिजे, असे दाखविता येते. मग या विकृतीचे प्रमाण नकाशाच्या निरनिराळ्या भागांत भिन्न असले तरी चालते, ही अट सोळाव्या शतकातील गेरहार्ट मर्केटर या फ्लेमिश नकाशातज्ञांनी शोधून काढलेल्या पद्धतीत पूर्ण होते आणि अशा प्रकारे केलेल्या नकाशांचा वापर मोठ्या प्रमाणात होतो.
मर्केटर पद्धतीने नकाशे करीत असता जसजसे विषुववृत्तापासून दूर उत्तर अथवा दक्षिण ध्रुवाकडे जावे तसतसे या प्रक्षेपणामुळे येणाऱ्या विकृतीचे प्रमाण वाढत जाते. याच कारणामुळे ग्रीनलंड या उत्तर ध्रुवाजवळील बेटाचे क्षेत्रफळ हे अमेरिकेच्या संयुक्त संस्थानांच्या क्षेत्रफळाच्या केवळ एक पंचमांशच असता मर्केटर पद्धतीने काढलेल्या नकाशात जवळजवळ दुप्पट भासमान होते. दक्षिण व उत्तर ध्रुवांजवळील मार्गक्रमणास अशा मोठ्या विकृतीमुळे मर्केटर प्रक्षेपणाऐवजी लँबर्ट प्रक्षेपण पद्धतीने [→ प्रक्षेपण, नकाशाचे] तयार केलेल्या नकाशांचा उपयोग केला जातो. ही पद्धती अठराव्या शतकातील तज्ञ योहानं लँबर्ट यांनी शोधून काढली.
मर्केटर नकाशावरील कोणत्याही दोन स्थाने जोडणाऱ्या सरळ रेषेस ऱ्हंब रेषा किंवा एकदिश नौपथ असे म्हणतात [→ ऱ्हंब रेषा]. वाहन जर आरंभ स्थानापासून या रेषेने दर्शविलेल्या दिशेने चालविले, तर वाटेत दिशा न बदलता अंतिम स्थानास पोहोचू शकेल पण वाहनाचा प्रत्यक्ष भूपृष्ठावरिल प्रवास मागे हा बहुतेक वेळी वक्रच असतो.
गोलाच्या मध्यातून जाणाऱ्या प्रतलाने गोलाच्या पृष्टभागावर निर्देशित झालेल्या वर्तुळास गुरुवृत्त असे म्हणतात. पृथ्वीवरील कोणत्याही दोन स्थानांमधून जाणारे असे एकच गुरुवृत्त असते. एका स्थानापासून दुसऱ्या स्थानाकडे जाण्याचे लघुत्तम व महत्तम लांबीचे गतिमार्ग याच गुरुवृत्तावर असतात.
वाहनाचा नियोजीत प्रवास जर विषुववृत्ताजवळील अक्षांशांत असेल, तर लघुत्तम गतिमार्ग आणि ऱ्हंब रेषेने दर्शविलेला गतिमार्ग यांच्या लांबीत विशेष फरक पडत नाही पण प्रवास जर उच्च अक्षांशांत असेल, तर हा फरक वाढत जातो आणि लघुत्तम गतिमार्ग अनुसरणे लाभदायक होते. त्यासाठी प्रवासात दिक्सूचकाने (होकायंत्राने) दर्शवलेल्या दिशेत वेळोवेळी बदल करावे लागतात.
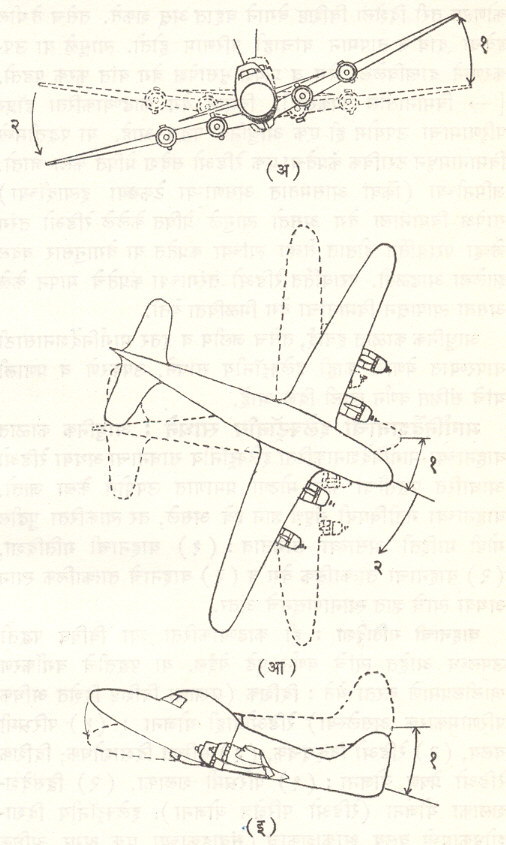
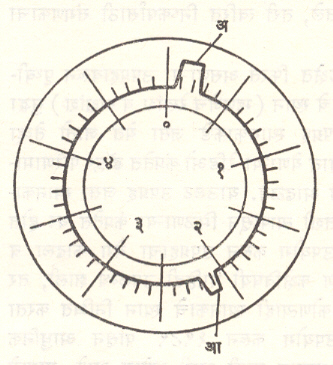
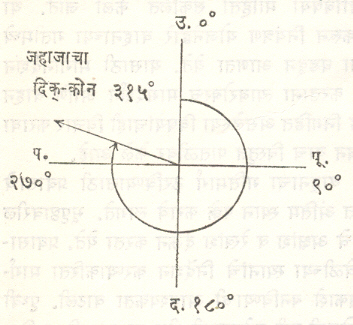 वाहनाचा दिक्-कोन भौगोलीक अथवा चुंबकीय उत्तर-दक्षिण दिशेशी सापेक्ष मोजला जातो. जेव्हा वाहनाचा रोख उत्तरेस असेल तेव्हा दिक्-कोन शून्य अंश समजतात आणि तेथून घटिवत् (घड्याळाच्या काट्यांच्या गतीच्या दिशेने] मापन करून दिक्-कोन ३६० अंशांपर्यंत दर्शवितात (आ. १).
वाहनाचा दिक्-कोन भौगोलीक अथवा चुंबकीय उत्तर-दक्षिण दिशेशी सापेक्ष मोजला जातो. जेव्हा वाहनाचा रोख उत्तरेस असेल तेव्हा दिक्-कोन शून्य अंश समजतात आणि तेथून घटिवत् (घड्याळाच्या काट्यांच्या गतीच्या दिशेने] मापन करून दिक्-कोन ३६० अंशांपर्यंत दर्शवितात (आ. १).
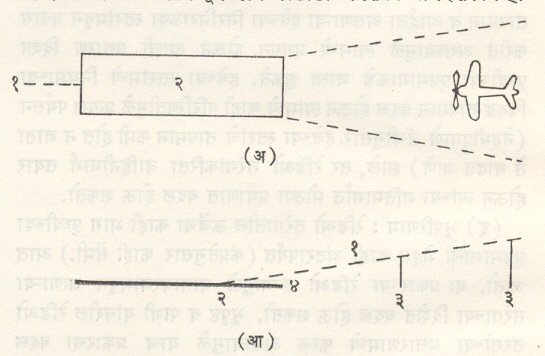
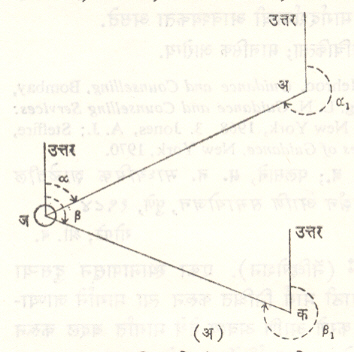 वाहनाचा प्रवास पूर्वनियोजीत मार्गावरून (अथवा वाटेत योग्य कारणास्तव बदललेल्या मार्गावरून) होत आहे याची खात्री करून घेण्याकरिता गतिमान वाहनाची निरनिराळ्या वेळची तात्कालिक स्थाने निश्चित करणे आवश्यक ठरते. याकरिता दोन अथवा अधिक ज्ञात मानकांपासूनची (प्रमाणभूत स्थानांपासूनची) वाहनाची अंतरे अथवा सापेक्ष दिक्-कोन मोजून स्थान निश्चिती करता येते. यासाठी भूमिवरील क्षेत्रचिन्हे, दीपगृहे, प्रकाश शलाका, रेडिओ केंद्र इतकेच नव्हे, तर काही वेळा ज्यांचे भूपृष्ठावरिल स्थान माहीत आहे अशी दुसरी वाहने अशा विविध प्रकारच्या मानकांचा उपयोग करता येतो. आ. २ मध्ये दाखविल्याप्रमाणे मानक सापेक्ष दिक्-कोन अथवा अंतरे मोजून वाहनाचे तात्कालिक स्थान निश्चित करता येते.
वाहनाचा प्रवास पूर्वनियोजीत मार्गावरून (अथवा वाटेत योग्य कारणास्तव बदललेल्या मार्गावरून) होत आहे याची खात्री करून घेण्याकरिता गतिमान वाहनाची निरनिराळ्या वेळची तात्कालिक स्थाने निश्चित करणे आवश्यक ठरते. याकरिता दोन अथवा अधिक ज्ञात मानकांपासूनची (प्रमाणभूत स्थानांपासूनची) वाहनाची अंतरे अथवा सापेक्ष दिक्-कोन मोजून स्थान निश्चिती करता येते. यासाठी भूमिवरील क्षेत्रचिन्हे, दीपगृहे, प्रकाश शलाका, रेडिओ केंद्र इतकेच नव्हे, तर काही वेळा ज्यांचे भूपृष्ठावरिल स्थान माहीत आहे अशी दुसरी वाहने अशा विविध प्रकारच्या मानकांचा उपयोग करता येतो. आ. २ मध्ये दाखविल्याप्रमाणे मानक सापेक्ष दिक्-कोन अथवा अंतरे मोजून वाहनाचे तात्कालिक स्थान निश्चित करता येते.
वाहन जाण्यापासून मानक स्थाने अ आणि क यांचे दिक्-कोन (अनुक्रमे α वß) एकाच वेळा मोजले आणि अ व क या स्थानंपासून त्यांच्या व्युत्क्रम कोनांवरून (α1 वß1) रेषा काढल्या. या रेषा जिथे एकमेकींस छेदतात ते वाहनाचे दिलेल्या मानक स्थानांच्या सापेक्ष तात्कालीक स्थान निश्चित होते.α वß कोन एकाच वेळी मोजता न आल्यास त्यांच्या मापनाला लागलेल्या कालावधीत वाहन कोणत्या दिशेने व वेगाने चालते याचा विचार करून गणिताने स्थाननिश्चिती करावी लागते.
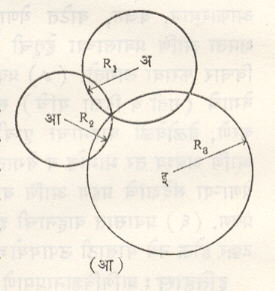
दोन अगर अधिक मानक स्थानांपासून वाहनाचे अंतर काढता आल्यास त्या स्थानांपासून त्या अंतरांची त्रिज्या असलेली वर्तुळे काढून ती जेथे एकमेकांस छेदतात त्या दोन बिदूंपैकी एका बिंदूवर वाहन असते. तीन मानक स्थानांपून अंतरे समजल्यास स्थान निश्चिती पूर्ण होते.
भूपृष्ठावरील मार्गनिर्देशन: प्राथमिक अवस्थेत मानव पायी प्रवास करीत असे त्यामुळे त्याच्या प्रवास सीमित असे. दृष्टिपथातील टेकड्या, नद्यानाले इ. क्षेत्रचिन्ह आणि सूर्य, तारे यांचे अवलोकन करून त्याचे मार्गनिर्देशनाचे काम भागात असे. पुढे त्याने घोडा, उंट, हत्ती वगैरे पशूंवर स्वामित्व मिळवल्यावर त्याला पशूवर बसून अथवा पशूंनी ओढल्या जाणाऱ्या वाहनांतून पुष्कळ दूरचा प्रवास करता येऊ लागला. जवळजवळच्या वस्त्यांमध्ये पुन्हा पुन्हा प्रवास झाल्याने आपोआपच वाटा तयार झाल्या. त्यानंतर मुख्य मुख्य गावे जोडणारे रस्ते तयार करण्यात आले. काही नद्यानाल्यांवर पूल बांधण्यात आले आणि प्रवासात विश्रांतिस्ताने स्थापन करण्यात आली. प्रथम याविषयी माहिती आणि वाटेत येणाऱ्या अडचणी या एकमेकांस तोंडी सांगून त्याप्रमाणे मार्गनिर्देशन केले जाई. कालांतराने नकाशावर सांकेतिक खुणांनी ही सर्व माहिती देता येऊ लागल्याने मानवास जवळचा, सुरक्षित व वाहन चालवण्यास योग्य मार्ग कोणता हे समजू लागले. एकोणीसाव्या शतकाच्या मध्याच्या आगगाडीचा शोध लागून लोहमार्ग बांधण्यात आले व प्रवास जलद होऊ लागला. एकोणिसाव्या शतकाच्या शेवटी खनिज तेलाचा इंधन म्हणून उपयोग करता येऊन त्याच्या साह्याने चालणारी वाहने उपलब्ध झाली. वाहनांची झपाट्याने उत्क्रांती होऊन ती अधिकाधिक वेगवान व वजनदार होत गेली त्यामुळे नगरात आणि नगरे जोडणाऱ्या मार्गावरील वाहतूक सारखी वाढत राहिली. या वाहतुकीस योग्य असे पक्के रस्ते बांधणे आणि वाहतुकीचे नियंत्रण करणे अपरिहार्य झाले.
भूमीवर एका स्थानापासून दुसऱ्या स्थानाला जाण्यासाठी तयार मार्ग, नकाशे व क्षेत्रचिन्हे यांचा मुख्यतः उपयोग करतात. क्षेत्रचिन्हे अनेक प्रकारची असतात. उदा., टेकड्या, पर्वतशिखरे, नद्यानाले, प्रचंड वृक्ष, देवळांचे कळस, गावे इ. होत. गावे बहुधा रस्त्याने जोडलेली असतात. प्रवासाचे आरंभ स्थान व इच्छित अंतिम स्थान निश्चित झाल्यावर नकाशा पाहून कोणता मार्ग व कोणते वाहन वापरावयाचे, हे ठरविणे सोपे पडते.
मुख्य नगरांपासूनचे रस्त्यावरचे अंतर दर्शविणारे दगड अथवा फलक रस्त्याच्या कडेला लावतात. भूमीवरील अंतरे किलोमीटर आणि संविधी मैल (इंग्रजी भाषा बोलली जाणाऱ्या देशांतील लांबीचे एकक = ५,२८० फूट ) अथवा त्यांचे भाग यांत लिहिली जातात. मार्गात ठिकठिकाणी पुढे येणारे धोके समजावेत म्हणून सांकेतिक फलक लावतात. उदा., अरूंद पूल, दुर्गम चढउतार, तीक्ष्ण वळणे, घाट इत्यादी.
भूमीवरील वाहतूक आंतरराष्ट्रीयही असू शकते. यास्तव वाहन चालकास हे सांकेतिक फलक सहज समजावेत म्हणून ते सर्व राष्ट्रांत एकच ठेवण्याचा प्रयत्न वेळोवेळी राष्ट्रप्रतिनिधींची बैठक घेऊन केला जातो, तरीही निरनिराळ्या राष्ट्रांत हे सांकेतिक फलक आणि वाहतुकीचे नियम यांत काही लहानमोठे फरक राहतातच.
वाहतुकीचे नियम व निर्बंध : वाहनांची टक्कर होऊ नये म्हणून वाहने रस्त्याच्या डाव्या बाजूने चालवावी असा नियम भारत व राष्ट्रकुलांतील काही राष्ट्रांत आहे. इतर राष्ट्रांत ती उजव्या बाजूने चालविण्याचा नियम आहे. वाहतूक जलद व्हावी म्हणून रस्त्याच्या काही भागावर एकेरी वाहतुकीचा नियम असतो. तो फलकांनी दाखविला जातो. तेथे रस्त्याच्या एकाच बाजूने वाहने चालविण्याचा नियम नसतो. दाट वस्तीत शाळा, कठीण वळणे इ. कारणांनी होणारे अपघात टाळण्यासाठी वाहनांच्या वेगावर मर्यादा घातली जाते. दोन अथवा अधिक मार्ग जेथे एकमेकांस छेदतात आणि वाहतूक बरीच असते येथे वाहतुकीचे नियंत्रण करणे आवश्यक असते. हे नियंत्रण वाहतूक अधिकारी हाताने विशिष्ट खुणा करून करतो. अथवा रंगीत दिव्यांनी केले जाते. हे रंगीत दिवे स्वयंचलित अथवा हस्तनियंत्रित असतात. समोर लाल दिवा असेल, तर वाहनास थांबण्याचा आदेश असतो. त्याऐवजी हिरवा दिवा असल्यास पुढे जाण्यास अनुज्ञा असते. समोर जाण्यास प्रतिबंध असता काही वेळा हिरव्या दिव्यातील बाणाने वाहनास डाव्या अथवा उजव्या बाजूस वळून जाण्यास अनुज्ञा दिली जाते. समोर नारिंगी दिवा असल्यास आधीचा आदेश लवकरच बदलण्याची सूचना असते. वाहन चालकाने वरील सर्व निर्बंघ पाळले पाहिजेत आणि धोक्याच्या सूचनांचा विचार करून वाहनाचा वेग मर्यादित ठेवला पाहिजे. यांत्रिक शक्तीने चालणाऱ्या वाहनावर वाहन किती चालले, हे दर्शविणारे उपकरण लावलेले असते. वाहनाच्या चाकाचा चालताना एक फेरा झाला म्हणजे वाहनाच्या चाकाच्या परिघाइतक्या लांबीचा प्रवास झालेला असतो. याचा उपयोग करून हे उपकरण झालेल्या प्रवासाचे अंतर दर्शविते. याच गोष्टींचा उपयोग करून हे चाकाच्या फेऱ्यांच्या वेगावरून वाहनाचा वेग दाखविण्याची सोय केलेली असते. वाहन चालकाने आपण वाहनाच्या वेगात अथवा दिशेत बदल करणार असल्यास ते इतरांस कळावे म्हणून चालकांस सांकेतिक खुणा कराव्या लागतात. या खुणा हाताने अथवा दिव्याने करता येतात. रात्रीच्या वेळी वाहनावर पुढच्या बाजूस पांढरे व मागच्या बाजूस लाल दिवे लावले पाहिजेत, असा नियम आहे.
मोठमोठ्या वाळवंटांतून प्रवास करताना क्षेत्रचिन्हे अत्यल्प असल्याने, तसेच तयार मार्ग नसल्याने सूर्य, तारे यांचे अवलोकन करून मार्गनिर्देशन करावे लागते.
युद्धात रणगाडे वाळवंटे, ओसाड माळ इ. ठिकाणी चालवावे लागतात. त्यांचे वेळोवेळीचे स्थानांचे अनुमान करण्यासाठी संगणकांचा (गणकयंत्राचा) उपयोग मोठ्या प्रमाणात केला जातो. सूचीद्वारे मिळालेली दिक्-कोनाविषयीची माहिती व वाहनाच्या चाकाच्या गतिमापनापासून मिळणारी वेग इ. राशींबद्दलची माहिती संगणकाला विद्युत् संदेशाच्या स्वरूपात सतत पुरविली जाते. पुरविलेल्या माहितीचा उपयोग करून संगणक वाहनाचे तात्कालिक अनुमानित स्थान गणिती क्रियेद्वारे काढतो. यामुळे संगणकाला वाहनाचे सातत्याने मार्गनिर्देशन करणे शक्य होते.
जलपृष्ठावरील मार्गनिर्देशन : प्रारंभिक काळात मानव जलपृष्ठावर प्रवास करताना किनाऱ्यावरील क्षेत्रचिन्हे दृष्टिपथात ठेवून प्रवास करीत असे. त्याला किनाऱ्यापासून दूर जावयाचे असेल तेव्हा तो सूर्य, तारे यांचे अवलोकन करून आपल्या जलपृष्ठावरील तात्कालिक स्थानाचा आदमास करीत असे तथापि चंद्र, सूर्य, तारे किंवा किनाऱ्यावरील क्षेत्रचिन्हे कधी कधी नाविकांस ढग, धुके, पाऊस, हिमवर्षाव इ. कारणांनी दीर्घ काळपर्यंत दिसू शकत नसत. त्यातच जोराचे वारे व सागरातील प्रवाह यांमुळे जहाजे भरकटत असत. दीर्घ कालाच्या अनुभवाने ही संकटे नाविक टाळू शकू लागले. पॅसिफिक महासागराच्या दक्षिण विभागात अनेक लहान लहान बेटांचे समूह आहेत. तेथील लोक नावेतून करावयाच्या प्रवासमार्गाचे नियोजन आकाशात दिसणाऱ्या ताऱ्यांच्या साहाय्याने पुरातन काळापासून करीत असत, अशी माहिती मिळते. निरनिराळ्या बेटांच्या माथ्यावरून विशिष्ट तारे प्रतिवर्षी ठराविक वेळी येतात, हे त्यांना माहित होते. तसेच ऋतुमानाने होणारे समुद्रावरील पाण्याचे आणि वाऱ्याचे प्रवाह यांची त्यांना माहिती होती. या माहितीचा उपयोग करून ते प्रवासाचा आरंभकाल व प्रवासाचा गतिमार्ग निश्चित करीत असत. विशिष्ट तारा खस्वस्तिकावर (निरीक्षकांच्या थेट माथ्यावरील खगोलाच्या बिंदूवर) येईपर्यंत वाट पहावी लागे. व यानंतरच प्रवास सुरू करता येत असे, हा या पद्धतीमधील एक दोष आहे.
जलपृष्ठावरील प्रवास राष्ट्रांतर्गत अथवा आंतरराष्ट्रीय असू शकतो. त्यासाठी आंतरराष्ट्रीय नौकानयन संघटनेकडून नियम ठरविले जातात. यातच किनाऱ्याजवळील व बंदरांतील अडथळे व धोके वाहनचालकास समजावे, वाहनांची टक्कर होऊ नये इत्यादींसाठी करावयाचे उपाय आणि काळावयाचे नियम यांचा अंतर्भाव होतो. या नियमांविषयीची माहिती वरील संघटना वेळोवेळी प्रसिद्ध करते.
जलपृष्ठ मार्गनिर्देशनाचे दोन प्रमुख भाग पडतात. बंदारांतील व किनाऱ्याजवळील मार्गनिर्देशन हा पहिला भाग आणि भर समुद्रातील मार्गनिर्देशन हा दुसरा भाग. किनाऱ्यालगत समुद्रात प्रवास करणाऱ्या जहाजांच्या मार्गनिर्देशनाकरिता किनाऱ्यावरील क्षेत्रचिन्हांचा उपयोग केला जातो. किनाऱ्यावरील मोक्याच्या जागी दीपगृहे उभी केलेली असतात. यांतून विशिष्ट रंगाचे प्रकाशझोत विशिष्ट क्रमाने प्रेषित केले जातात. त्यावरून कोणते दीपगृह प्रकाशझोताचे प्रेषण करीत आहे याचे ज्ञान होते. याशिवाय दीपस्तंभ, दीपनौका यांचाही दीपगृहाप्रमाणे उपयोग केला जातो [ → दीपगृह]. समुद्रातील किनाऱ्याजवळच्या व बंदरातील जहाजाच्या वाटेजवळील धोक्याच्या जागा दाखविण्याकरिता ⇨ बोयरे नांगरून ठेवलेले असतात. बोयरे निरनिराळ्या आकारांचे व रंगांचे असतात. त्यांवर विशिष्ट सांकेतिक खुणा व विशिष्ट रंगांचे दीप ओळखीसाठी, तसेच जहाज बोयऱ्याच्या कोणत्या बाजूने जावे हे दाखविण्यासाठी लावलेले असतात. दृश्यमानता अपुरी असेल तेव्हा प्रकाश दूरवर जाऊ शकत नाही. अशा वेळा पर्यायी योजना म्हणून ध्वनितरंग किंवा रेडिओ तरंगाचे प्रेषण करण्याची व्यवस्था केलेली असते. किनाऱ्याजवळील क्षेत्रचिन्हे, त्या भागातील समुद्रातील प्रवाह, पाण्याची निरनिराळ्या जागांची खोली, भरतीओहोटी, खडक इ. धोक्याची ठिकाणे या सर्व गोष्टींची सविस्तर माहिती देणारे तक्ते उपलब्ध असतात.
जहाजाजवळची पाण्याची खोली मोजण्याकरिता पूर्वीपासून एक ढोबळ पद्धती वापरात आहे. तीत एका लांब दोरीच्या टोकाला शिशाचा गोळा बांधला जातो आणि त्यापासून ठराविक अंतरावर गाठी मारल्या जातात. प्रत्येक गाठीवर निरनिराळ्या रंगाच्या चिंध्या बांधून ती गाठ गोळ्यापासून किती लांब आहे ते समजते. जहाज पुढे जात असता खलाशी तो गोळा प्रवासाच्या दिशेने दूर फेकतो आणि गोळा पाण्याच्या तळाशी टेकतो व जहाज जसजसे पुढे जाते तसतसे खलासी दोरी वर ओढून घेतो आणि जेव्हा जहाजाचे पुढचे टोक गोळ्याच्या वर येते तेव्हा पाण्याच्या पृष्ठभागाशी दिसणाऱ्या गाठीच्या रंगावरून तेथील पाण्याची खोली निश्चित होते. पाणी फार खोल नसेल, तर ही पद्धत उपयोगी पडते.
आधुनिक काळात ध्वनितरंग अथवा रेडिओ तरंग प्रेषित करून त्यास पाण्याच्या तळापासून मिळणाऱ्या प्रतिसादास किती वेळ लागतो हे मापून पाण्याची खोली मोजली जाते. [→ प्रतिध्वनी सोनार व सोफार].
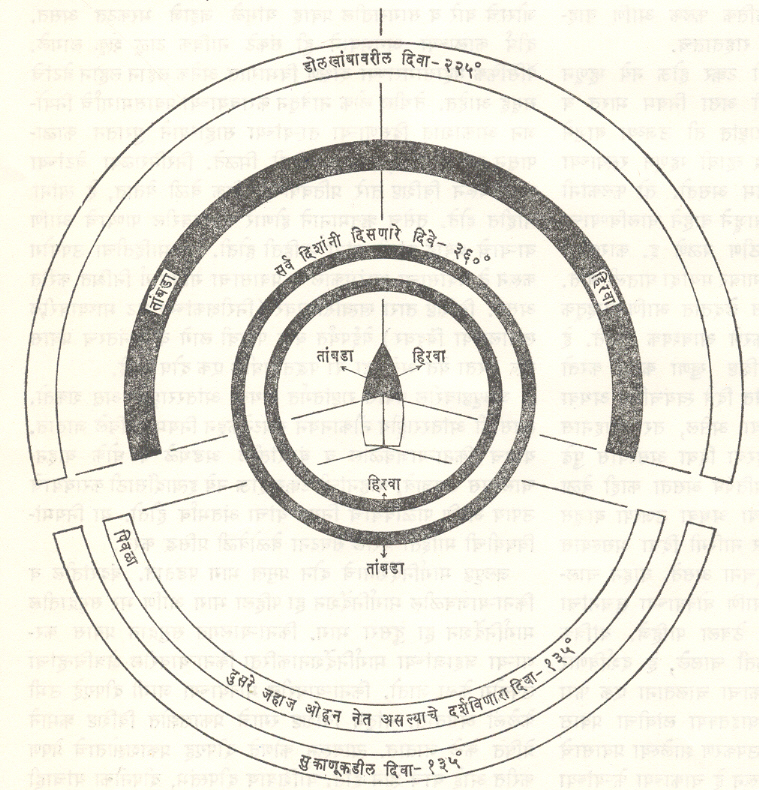
रात्रीच्या वेळी अथवा अपुरा प्रकाश असेल तेव्हा जहाजावर निरनिराळ्या परिस्थितींत विशिष्ट दिवे लावण्याविषयी आंतरराष्ट्रीय नियम आहेत. जहाजाचे अस्तित्व दाखविण्यासाठी डोलखांबावर एक किंवा अधिक दिवे लावतात. चालत्या जहाजाची पुढची, उजवी, डावी व मागील बाजू इतरांस समजावी यासाठी निरनिराळ्या रंगांचे दिवे विशिष्ट कोनातून दिसावेत अशी व्यवस्था असते. जहाजाच्या नेहमीच्या चालनावर अनेक कारणाने मर्यादा पडू शकतात. उदा., सुकाणू अथवा एंजिन यातील विकृती, जहाज दुसऱ्या जहाजास ओढून नेत असेल किंवा दुसरे जहाज त्या जहाजास ओढून नेत असेल वगैरे. अशा वेळी जहाजावर दिवसा काळी, गोल, त्रिकोणी, चौकोनी अथवा दंडगोलीय सांकेतिक चिन्हे लावली जातात आणी रात्री पांढरे, तांबडे व हिरवे दिवे विशिष्ट प्रकारे लावले जातात. डोलखांबावर निरनिराळ्या रंगांची निशाणे लावून संदेश दिला जातो. धुके, पाऊस, धूर किंवा हिमवर्षाव इ. कारणांनी दृश्यमानता अपुरी असेल तेव्हा स्थिर जहाजाचे अस्तित्व कळावे, तसेच जहाज जर मार्गक्रमण करीत असेल, तर त्याचे मार्गक्रमण व मार्गक्रमणात होत असलेले बदल इतरांस कळावेत यास्तव भोंग्याने व घंटेने सांकेतिक ध्वनी करून ते सूचित केले जाते.
जहाज बंदरात असताना त्याची हालचाल बंदराच्या अधिकाऱ्यांच्या आदेशानुसार करावी लागते. बहुतेक बंदरांत मार्गदर्शक (पायलट) प्रत्यक्ष जहाजावर जाऊन मार्गदर्शन करतो. जहाज बंदराच्या हद्दी पलीकडे गेल्यावर कप्तान जहाजाचा पूर्ण ताबा घेतो आणि इच्छित मार्गाने जहाज हाकारतो. दृश्यमानता अपुरी असते तेव्हा काही बंदरांत ⇨ रडारचा उपयोग करून बंदरातील जहाजांच्या हालचालींचे नियंत्रण केले जाते. ‘रटान’ नावाच्या पद्धतीमध्ये बंदराचे चित्रदर्शन दूरचित्रवाणी प्रेषणाच्या साहाय्याने बंदरातील सर्व जहाजांस पुरविले जाते. शोरॉन आणि इलेक्ट्रॉनीय स्थाननिर्देशक (इ. स्था. नि.) या रडार तत्त्वावर कार्य करणाऱ्या दोन यंत्रणा सागरी मार्गनिर्देशनामध्ये विशेषतः संनिरीक्षण (पहारा) करण्याकरिता वापरतात. एखाद्या स्थानकाकडे विवक्षित संदेश पाठविला असता त्याच्या प्रत्युत्तरावरून त्या स्थानकाची ओळख पटते. इ. स्था. नि. पद्धतीमध्ये अंदाजे दोनशे मेगॅहर्ट्झ कंप्रतेचे (एका सेकंदात १०६ कंपने = १ मेगॅहर्ट्झ) रेडिओ तरंग वापरले असल्यामुळे तिचा पल्ला अथवा परास मोठा असतो. शोरॉनमध्ये रेडिओ कंप्रता २१०–३२० मेगॅहर्ट्झच्या दरम्यान असल्यामुळे तिचा पल्ला थोडा कमी असतो.
स्थाननिश्चिती : जहाज बंदरातून बाहेर पडल्यावर आपल्या पूर्व नियोजित मार्गाने प्रवासास आरंभ करते. त्याचा प्रवास चालू असताना त्याचे तात्कालिक स्थान वेळोवेळी निश्चित करावे लागते. प्रवासाच्या आरंभ स्थानापासून अथवा प्रवासामध्ये एखाद्या निश्चित संदर्भ स्थानापासून जहाजाने (वा अन्य वाहनाने) निरनिराळ्या दिशांनी व वेगाने किती काळ प्रवास केला यावरून गणिताने त्याच्या तात्कालिक स्थानाचे अनुमान करतात. या क्रियेस ‘अनुमानित पथ गणना’ असे म्हणतात.
पाण्यातील प्रवाहाची दिशा व वेग, तसेच वाऱ्याच्या प्रवाहाची दिशा व वेग वगैरे इतर अनिश्चित कारणांचा जहाजावर होणारा परिणाम विचारात घेऊन जहाजाच्या तात्कालिक स्थानाचे अनुमान करतात, त्यास ‘अंदाजी स्थान अनुमान’ असे म्हणतात. यासाठी जहाजाचा वेळोवेळीचा वेग काढावा लागतो.
जहाजाचा वेग काढण्याची पद्धती : जहाजाचा वेग काढण्याकरिता पूर्वी एक ढोबळ पद्धत वापरीत असत. या पद्धतीमध्ये काही ठराविक समान अंतरावर गाठी असलेल्या एका लांब दोरीचे टोक एका ओंडक्यास बांधून तो ओंडका समुद्रात जहाजाच्या मागल्या बाजूस टाकला जाई. जहाज जसजसे ओंडक्यापासून दूर जाऊ लागते तसतसे ओंडका ओढला जाऊ नये अशा बेताने त्याला बांधलेली दोरी सैल सोडतात आणि ओंडका पाण्याच्या पृष्ठावर स्थिर राहतो. कालमापकाच्या साह्याने मोजलेल्या एका कालखंडात ओंडक्याला किती लांबीची दोरी पुरवावी लागली यावरून जहाजाचा पाण्याच्या सापेक्ष वेग काढण्यात येई. काही काळानंतर ओंडक्याच्या ऐवजी एक अनुसरणी आवर्तक (जहाजाच्या मागून ओढली जाणारी व स्वतःच्या अक्षाभोवती फिरणारी प्रयुक्ती) वापरण्यात येऊ लागला. हा जहाजाच्या वेगाने पाण्यातून ओढला जातो. आवर्तकाने पूर्ण केलेल्या फेऱ्यांवरून जहाज किती चालले हे समजते. तसेच आवर्तकाच्या फेऱ्यांच्या गतीवरून (ठराविक कालखंडात पूर्ण केलेल्या फेऱ्यांच्या संख्येवरून) जहाजाचा पाण्याच्या सापेक्ष वेग दर्शविला जातो. आधुनिक काळात जहाजाचा वेग व गतिदिशा जाणून घेण्याकरिता विद्युत् चुंबकीय अभिज्ञातकाचा उदा., चर्निकिफ लॉगचा (जहाजाचा वेग व कापलेले अंतर विद्युत् रीतीने नोंदविण्यासाठी छोट्या पंख्याचा उपयोग करणाऱ्या उपकरणाचा) वापर केला जातो. जहाजाचा पाण्याच्या सापेक्ष जो वेग असतो त्याचा या उपकरणात उपयोग केलेला असतो. आधुनिक जहाजांच्या आणि विशेषतः पाणबुड्यांच्या मार्गनिर्देशनात निरूढी मार्गनिर्देशकाच्या साह्याने वाहनाचा वेग मिळविता येतो) त्याचे अधिक वर्णन पुढे दिलेले आहे).जहाजाच्या मार्गनिर्देशनात अंतरे नाविक मैलात मोजतात. नाविक मैलाची प्राथमिक कल्पना पृथ्वीच्या परिघाच्या १/२१, ६०० वा भाग अशी होती पण पृथ्वीचा परिघ सर्व दिशांनी सारखा नसल्याने नाविक मैलाची लांबी १,८५२ मी, ठरविण्यात आली. दोन्हीतील फरक अत्यल्प असल्याने व्यवहारात तो लक्षात घेणे आवश्यक नाही. दर तासाला एक नाविक मैल या वेगास एक नॉट असे म्हणतात.
जहाजाच्या गतिमार्गाची दिशा ठरविण्याची पद्धती : उत्तर ध्रुवाचा तारा पृथ्वीसापेक्ष जवळजवळ स्थिर असतो. त्यावरून उत्तर दिशा समजू शकते. कोणत्याही स्थानापासून क्षितिजाबरोबर ध्रुव तारा करीत असलेला उन्नत कोन स्थूलमानाने त्या स्थानाच्या अक्षांशाबरोबर असतो. हे स्कँडिनेव्हिया देशातील नाविकांना पुरातन कालापासून माहीत होते. उदा., उत्तर ध्रुवापाशी ध्रुवतारा ९० अंशांचा उन्नत कोन करतो व त्या ठिकाणचे अक्षांशही ९० असतात. भूपृष्ठावरील विशिष्ट अक्षांशावरील कोणत्याही जागेवरून ध्रुव ताऱ्याचा उन्नत कोन एकच असतो या गोष्टीचा लाभ घेऊन पूर्वी जलपर्यटक जहाज दक्षिणोत्तर दिशेने चालवीत आणि तो कोन इच्छित स्थळावरून दिसणाऱ्या ध्रुव ताऱ्याच्या उन्नत कोनाबरोबर झाला म्हणजे तेथून पूर्वेस अथवा पश्चिमेस जहाज चालवून किनाऱ्यावर येत असत. तेथून किनारा प्रत्यक्ष पाहून अवश्य तर उत्तरेस अथवा दक्षिणेस जाऊन इच्छित स्थळी पोहोचत.
ध्रुव ताऱ्याचा दिशा ठरविण्यासाठी तीव्र सूर्यप्रकाश, धुके, ढग इ. कारणांनी पुष्कळदा उपयोग होऊ शकत नाही. दक्षिण गोलार्धात तर ध्रुव तारा दिसू शकत नाही, तसेच दुसराही संदर्भ तारा नाही. यासाठी दिशादर्शनाचे इतर उपाय योजावे लागतात, इसवी सनाच्या आरंभास चिनी लोकांना अयस्कांताने उत्तर-दक्षिण दिशा कळते, असा शोध लागल्याचा उल्लेख सापडतो. अरब लोकांनी हा शोध पश्चिमी राष्ट्रापर्यंत पोहोचविला, असे अनुमान केले जाते. कोलंबस (१४५१–१५०६) यांच्या काळापर्यंत चुंबकीय सूचीचा उपयोग सर्रासपणे होऊ लागला होता. भौगोलिक उत्तर-दक्षिण दिशा आणि चुंबकीय सूचीने दर्शविलेली दिशा यांमध्ये बहुशः फरक असतो, हे त्यानंतर लक्षात आले. या दिशांतील कोनास दिक्पात असे म्हणतात [→ दिक्पात व दिक्पातमापन]. चुंबकीय ध्रुव व भौगोलिक ध्रुव हे एका स्थळी नसून त्यांमध्ये अंतर आहे हे याचे मुख्य कारण होय. हा दिक्पात सर्व ठिकाणी एकच नसतो. अशा दिक्पाताने निर्माण होणाऱ्या दोषांचे निवारण करता यावे म्हणून एकोणिसाव्या शतकात पृथ्वीवरील निरनिराळ्या स्थानी असणाऱ्या दिक्पातांचे मापन करण्यात आले. हे दिक्पात शोधण्याकरिता भौगोलिक उत्तर-दक्षिण दिशा ठरविण्यासाठी सूर्य व तारे यांच्या आकाशातील स्थानांचा उपयोग करण्यात आला. हे मापलेले दिक्पात नकाशांत व तक्त्यांत दाखविण्यात आले. हे दिक्पातही हळूहळू कमी अधिक होत असतात आणि त्यामुळे वेळोवेळी नकाशे व तक्ते सुधारावे लागतात.
सूचीच्या परिसरात जर लोखंडाच्या वस्तू असतील, तर त्यांच्या चुंबकीय गुणधर्मामुळे चुंबकीय सूचीच्या दिशादर्शनात आणखी एक प्रकारचा फरक पडू शकतो. यास विचलन असे म्हणतात. हे विचलन जहाजाचे तोंड निरनिराळ्या दिशांत फिरविले असता निरनिराळे असू शकते. लाकडी जहाजाची जागा लोखंडी बांधणीच्या जहाजाने जेव्हा घेतली तेव्हा हा प्रश्न अधिकच महत्त्वाचा झाला. सूचीच्या आसपास मृदू लोहाचे आणि चुंबकीय सूचीचे खंड ठराविक जागी बसविले असता विचलन कमी करता येते. त्यानंतर जहाजाचे तोंड निरनिराळ्या दिशांस केले असता सापडलेले विचलनाचे फरक यांचा एक तक्ता बनविण्यात येतो. हा तक्ता प्रतिवर्षी आणि जेव्हा जेव्हा जहाजाची मोठी दुरूस्ती केली जाते अथवा जहाजावर मोठ्या प्रमाणात लोहयुक्त मालाची चढउतार होते तेव्हा तेव्हा तपासून सुधारावा लागतो. [→ दिक्सूचक].
दिक्सूचकाच्या साहाय्याने जहाज इच्छित दिशेने चालविले जाते आणि वर दर्शविलेल्या पद्धतीने जहाजाच्या तात्कालिक स्थानाचे अनुमान करण्यात येते. अनुमानित स्थान व प्रत्यक्ष स्थान यांत कधी कधी फरक पडतो. वारा, पाण्यातील प्रवाह, जहाजावरील दिक्सूचकांतील त्रुटी इ. कारणांनी असा फरक पडू शकतो. यासाठी प्रवासात वेळोवेळी वाहन कोणत्या स्थानी आहे हे निश्चित करणे आवश्यक असते.
दोन अथवा अधिक मानक स्थानांपासून वाहन कोणत्या सापेक्ष दिशेस आहे. हे दिक्-कोन दर्पण अथवा रेडिओ दिशाशोधक अथवा कोणादर्श अशा साधनांनी मापन करून प्रत्यक्ष स्थाननिश्चिती करण्याची एक रीती आ. २ मध्ये मागेच स्पष्ट केली आहे.
याशिवाय आकाशातील मानक स्थानांचा म्हणजे सूर्य आणि तारे यांच्या स्थानाचे क्षितिजापासूनच्या उन्नत कोनांचे मापन करून अक्षांश आणि रेखांश निश्चित करता येतात. कोनांचे मापन उदग्र (उभ्या प्रतलातील मापने करणाऱ्या) कोणादर्शाने केले जाते. ताऱ्यापासून मिळणारा प्रकाश उदग्र कोणादर्शामध्ये एका अर्धरजत काचेवर परावर्तित केला जातो. त्यामुळे निरीक्षकाला क्षितिज आणि ताऱ्यांचे परावर्तित प्रतिबिंब एकाच पातळीवर आणून त्यांच्यामधील कोन मोजता येतो. काही उदग्र कोणादर्शात क्षितिज दिसत नसेल तेव्हा क्षितिजाऐवजी त्यावर लावलेल्या पाणसळीचा उपयोग करून कृत्रिम क्षितिज उत्पन्न करून कोनमोपन करता येते. उन्नत कोनमापन करण्याची वेळ अचूक माहीत असणे आवश्यक असते. ही वेळ ग्रिनिच माध्य वेळेच्या संदर्भाची असलीच पाहिजे कारण सध्या उपलब्ध असलेली खगोलीय कोष्टके ग्रिनिच माध्य वेळेच्या संदर्भात असतात. अचूक वेळ कळण्यासाठी विश्वसनीय कालमापक वापरतात [→ कालमापक]. ताऱ्यांच्या उन्नत कोनांचे मापन सकाळी सूर्योदयापूर्वी, तसेच सूर्यास्तानंतर संधिप्रकाशात केले जाते. या कोनावरून तात्कालिक स्थानांचे अक्षांश व रेखांश कोष्टके वापरून काढता येतात. सूर्य शिखरबिंदूवर आला असताना उन्नत कोन मापून अक्षांश मिळू शकतात. अशा प्रकारे प्रतिदिनी दुपारचे स्थान निश्चित केले जाते.
विसाव्या शतकाच्या आरंभापासून मार्गनिर्देशन व त्यातील स्थाननिश्चिती पद्धतीत सतत सुधारणा होत गेल्या. त्यासाठी निरनिराळी नवीन उपकरणे उपलब्घ झाली. त्यांत प्रामुख्याने धूर्णी दिक्सूचक, रेडिओ संदेश प्रेषक व संदेश ग्राहक, रडार, रेडिओ दिक्सूचक, निरूढी मार्गनिर्देशक ही जहाजावरील उपकरणे आणि टाकान, लोरान, डेक्का, कॉनसोल, ओमेगा इ. भूमीवरील स्थिर उपकरणे येतात. यांतील काही उपकरणांचे वर्णन पुढे हवाई मार्गनिर्देशनात केले आहे.
ध्रुवीय मार्गनिर्देशन : मागे लिहिल्याप्रमाणे विषुववृत्तापासून ६० अक्षांशापर्यंत मर्केटर प्रक्षेपणाने बनविलेले नकाशे व तक्ते मार्गनिर्देशनास वापरणे सोईचे असते. ६० ते ७० अंक्षांशापर्यंत लँबर्ट प्रक्षेपित नकाशे वापरून मार्गनिर्देशन करता येणे पण त्याहून उच्च अक्षांशातील प्रदेशात यांचाही चांगला उपयोग होऊ शकत नाही आणि ध्रुवाजवळच्या प्रदेशात मुळीच होऊ शकत नाही. त्याऐवजी विशिष्ट ध्रुवीय प्रक्षेपण पद्धतीने केलेल्या नकाशांचा आणि तक्त्यांचा उपयोग केला जातो. ध्रुवाजवळच्या प्रदेशात सर्व रेखांश ध्रुव बिंदूपासून सरळ रेषांनी बाहेर निघतात आणि अक्षांश हे ध्रुव बिंदू हा मध्यबिंदू धरून समान मंडलाकार असतात. या उच्च अक्षांशांत ऱ्हंब रेषांचा उपयोग होत नाही. तसेच नेहमीची दिशा ठरविण्याची रीती फारच कमी प्रमाणात उपयोगी पडते आणि ध्रुव बिंदूशी निरूपयोगी होते कारण ध्रुव बिंदूपासून कोणीकडे जावयाचे म्हटले, तर ते उत्तर ध्रुवापासून दक्षिणेकडे अथवा दक्षिण ध्रुवापासून उत्तरेकडे जाता येते. या अडचणीमुळे नकाशे अथवा तक्ते यांची फेररचना करावी लागते. हे करण्यासाठी नेहमीप्रमाणे एकमेकींस काटकोनात कापण्याऱ्या रेषांचे जाल नकाशावर काढले जाते. त्यातील अर्ध्या रेषा ग्रिनिच रेखांशास समांतर असतात.
ध्रुवाजवळील प्रदेशात पृथ्वीच्या चुंबकीय ध्रुवाच्या उपस्थितीमुळे चुंबकीय सूचीचा वापर करणे शक्य होत नाही. यासाठी अवकाशातील एखाद्या काल्पनिक बिंदूकडे दिक्विन्यास असणाऱ्या ⇨ घूर्णीचा उपयोग दिशा निश्चितीकरिता करतात. पृथ्वीच्या स्वतःभोवतीच्या परिभ्रमण गतीमुळे यात व्यत्यय निर्माण होणार नाही, याची काळजी घ्यावी लागते.
पाणतीर : (टॉर्पेडो). हे शस्त्र जहाजातून, पाणबुडीतून अथवा विमानातून शत्रूच्या जहाज, पाणबुडी वगैरे लक्ष्यांवर सोडून त्याचा विंध्वस करण्याकरिता वापरतात. आरंभीच्या काळात पाणतीर सोडण्याच्या आधी त्याची दिशा निर्धारित करून लक्ष्यावर नेम धरून सोडीत. दिशादर्शी धूर्णी [→ घूर्णी ] एंजिन नियंत्रण व खोली संवेदक या साधनांच्या साह्याने तो एकाच दिशेत मार्गक्रमण करील अशी व्यवस्था असते. आधुनिक काळात लक्ष्य आपले स्थान जरी सारखेबदलत राहिले, तरी त्यावरील चुंबकीय वस्तू अथवा लक्ष्यावरून निघणारे ध्वनितरंग यांचा पाणतीरावरील उपकरणे मागोवा घेत राहून आवश्यक तर पाणतीराच्या मार्गक्रमणाची दिशा बदलून त्याने लक्ष्याकडेच जात रहावे, अशी सोय केलेली असते.
स्वयंचलित सुकाणूदार : मानवी नियंत्रणाला पर्याय म्हणून आधुनिक काळात याचा उपयोग करता येतो. वाहनाचे स्थान व चालन यांबद्दल माहिती मिळविण्याकरिता असणाऱ्या साह्यभूत योजनांच्यापासून संदेश घेऊन त्यानुसार जलवाहनाचे मार्गनिर्देशन स्वयंचलित सुकाणूदाराच्या साह्याने होऊ शकते. या पद्धतीत सुकाणू यंत्रणा एका धूर्णी स्थापित दिक्सूचकास जोडलेली असते आणि त्यामुळे जहाजाची दिशा थोडीशी जरी बदलू लागली, तरी ती पूर्वनियोजित दिशेकडे आपोआप नेली जाते.
पाणबुड्यांचे मार्गनिर्देशन : पाणबुडीचे जलपृष्ठावरून चालन होत असताना मार्गनिर्देशन जलपृष्टावरील जहाजाच्या मार्गनिर्देशनाप्रमाणेच असते. प्राथमिक काळात पाणबुड्या केवळ शत्रूची जहाजे इत्यादींवर स्वतः न दिसता हल्ला करण्यासाठी जलपृष्ठाखाली जात आणि ⇨ परिदर्शका मधून निरीक्षण करून शत्रूच्या जवळ जाऊन हल्ला चढवीत. जलपृष्ठाखाली पाणबुडीचे चालन करण्यासाठी लागणारी शक्ती विद्युत् घटमालेत साठवावी लागे. ती शक्ती संपत आली की, पाणबुडीला जलपृष्ठावर येऊन एंजिनाचा उपयोग करून पुन्हा भरावी लागे. दुसऱ्या महायुद्धापासून हवानळीचा उपयोग करून पाणबुडी जलपृष्ठाखाली असताही विद्युत् घटमालेचे शक्तीभरण करू शकते. आता अणुशक्तीचा वापर होऊ लागल्याने पाणबुड्यांना दीर्घकालपर्यंत जलपृष्ठाखालून प्रवास करता येतो. अशा जलपृष्ठाखालून करावयाच्या प्रवासात मार्गातील अडथळे शोधण्यास रडारसारखे पण ध्वनितरंगांचा उपयोग करणारे उपकरण वापरतात. त्यास सोनार असे म्हणतात [→ सोनार व सोफार]. यामध्ये वापरलेल्या ध्वनितरंगाची कंप्रता सु. ५० किलोहर्ट्झ एवढी असते. पाण्याखालील अंतरे मोजण्याकरिता प्रतिध्वनिमापक [→ प्रतिध्वनि] या उपकरणाचा वापर केला जातो. त्यामध्ये २० ते ३० किलोहर्ट्झ कंप्रतेच्या ध्वनितरंगाचा उपयोग केलेला असतो. याच कार्याकरिता वापरल्या जाणाऱ्या ॲसडिक या उपकरणात ध्वनितरंगाऐवजी उपयोग केला जातो. ⇨ डॉप्लर परिणामाचा उपयोग करून याच उपकरणाद्वारे पाणबुडीच्या वेगाचे मापन करता येते. ध्वनिच्या प्रेषणावर आधारलेल्या या उपकरणांचा वापर मर्यादित आहे.
पाणबुड्यांना मार्गनिर्देशनासाठी आदेश देण्याकरिता अती नीच कंप्रतेचे रेडिओ तरंग वापरण्याचे तंत्र विकसित करण्यात यश आलेले असून या तंत्राचा वापर सुरू होईल. यासाठी ३० ते ३०० हर्ट्झ या मर्यादेतील कंप्रतांचे रेडिओ तरंग वापरण्यात येतात. नेहमीच्या रेडिओ कंप्रता पट्ट्यातील (नीच कंप्रता, मध्यम कंप्रता, उच्च कंप्रता इ.) रेडिओ तरंग समुद्राच्या पाण्यात खोलवर पोहोचू शकत नाहीत, पाण्यामध्ये त्यांचे शीघ्र क्षीणन होते परंतु अती नीच कंप्रतेच्या रेडिओ तरंगांच्या बाबतीत असे होत नाही. समुद्राच्या पाण्यात शेकडो मीटर खोलीपर्यंत हे तरंग पोहोचू शकतात. त्यामुळे पाणबुड्या पाण्याखाली खोल अंतरावर असतानाही त्यांना आदेश देण्यासाठी या तरंगांचा उपयोग होऊ शकतो. मात्र या तरंगांच्या प्रेषणासाठी प्रचंड आकारमानाचे (अनेक किमी. विस्ताराचे) आकाशक (अंटेना) उभारावे लागतात व आकाशकाची कार्यक्षमता अत्यल्प असते. शिवाय रेडिओ तरंगाची कंप्रता अत्यंत कमी असल्यामुळे आदेश प्रेषणाचा वेगही फार कमी राहतो परंतु आदेश ग्रहणासाठी पाणबुडीला पाण्याच्या पृष्ठभागाजवळ येण्याचा धोका पत्करावा लागत नाही किंवा पाणबुडीला पाण्यावर तरंगणारे आकाशक वापरावे लागत नाहीत, हा या प्रणालीचा मोठा फायदा आहे. पाणबुडीच्या दिशादर्शनासाठी व स्थाननिश्चितीसाठी निरूढी मार्गनिर्देशकाचा विशेष उपयोग होतो.
हवाई मार्गनिर्देशन : हवाई वाहनांचे दोन मुख्य प्रकार आहेत : (१) भूपृष्ठावरील हवेपेक्षा हलक्या वायूने भरलेले फुगे हवेत उंच जातात. या फुग्यांना पाळणा जोडून त्यांतून प्रवास करता येतो. (२) हवेपेक्षा जड पण हवेतून प्रवास करीत असताना हवेशी होणाऱ्या प्रतिक्रियेमुळे उंच जाऊ शकणारी विमाने.
हवेपेक्षा हलकी विमाने : पहिल्या प्रकारच्या विमानांस ⇨ वातयान अथवा वायुमान म्हणतात. प्रारंभिक काळात फुग्यांत उष्ण हवा भरली जात असे पण असे फुगे आकाशात फार वेळ राहू शकत नसत. नंतर अशा फुग्यांत हायड्रोजन किंवा हीलियम वायू भरण्यात येऊ लागला. हे वायू हवेपेक्षा हलके असल्याने हे फुगे आकाशात दीर्घ काळ राहू शकत. आरंभीच्या काळात हे फुगे हवेतील प्रवाहानुसार जात. चालकाला विमानातील पूरकभार कमी करून विमानाची भूपृष्ठापासूनची उंची वाढविता येत असे. विमानातील हलका वायू कमी करून उंची कमी करता येत असे. बाकीचा प्रवास हवेच्या प्रवाहावर अवलंबून असे. अशा प्रकारच्या फुग्याला जोडलेल्या पाळण्यांतून मानव शेकडो किलोमीटरचा प्रवास करू शकतो पण हा प्रवास चालकाच्या इच्छेनुसार होत नसे. एकोणिसाव्या शतकाच्या अखेरीस लहान वाफ एंजिन वापरून काही प्रमाणात चालकाच्या इच्छेनुसार प्रवास करता येऊ लागला. विसाव्या शतकाच्या सुरूवातीस एंजिनात व उपकरणात अधिक सुधारणा झाल्यावर स्वेच्छेनुसार दूरचा प्रवास शक्य झाला. अशा प्रकारच्या वातयानाचे मार्गनिर्देशन जलपृष्ठावरील मार्गनिर्देशनाप्रमाणेच होत असे पण ह्यात बऱ्याचशा अडचणींची दखल घ्यावी लागे. उदा., निरनिराळ्या उंचीवरील वाऱ्याच्या प्रवाहांचा वेग व दिशा, वाळवंटे, समुद्र, पर्वत यांमुळे त्यांवर होणारे परिणाम, वादळे, पाऊस, हिमपात इत्यादी. या अडचणींना तोंड देऊनही अशा वाहनांतून पृथ्वी प्रदक्षिणा केल्याची उदाहरणे आहेत. अशा वातयानांचा उपयोग हल्लीच्या काळात जाहिराती व भूनिरीक्षण यांशिवाय इतर कारणांकरिता फारसा होत नाही.
हवेपेक्षा जड विमाने : यात दोन प्रकारांचा समावेश होतो : (१) स्थायी (न हलणाऱ्या) पंखांची विमाने आणि (२) घूर्णी (फिरणाऱ्या) पंख्यांची विमाने. प्राथमिक काळात विमाने फारच थोड्या अंतराचा प्रवास करू शकत, तसेच त्यांचा वेगही कमी असे व त्यांवर उपलब्ध असलेली उपकरणेही कमी असत. त्यांच्या मार्गनिर्देशनासाठी मर्केटर प्रक्षेपणावर बनविलेले नकाशे व तक्ते वापरले जात. या विमानांचे मार्गनिर्देशन जलपृष्ठावरील मार्गनिर्देशनाप्रमाणे केले जाई. पहिल्या महायुद्धापासून दुसऱ्या महायुद्धापर्यंतच्या काळात विमानाचा वेग व पल्ला यांत प्रगती होत राहिली. विमानाला मार्गनिर्देशनासाठी लागणारी उपकरणे मुख्यतः दिक्सूचक, हवासापेक्ष वेगदर्शक व ⇨ उच्चतापमापक (भूपृष्ठापासून वातावरणातील कोणत्याही ठिकाणची उंची मोजण्याचे साधन) ही असत.
साहाय्यक उपकरणे : विमानाचे संचारण योग्य प्रकारे करण्याकरिता व ते योग्य रीतीने चालले आहे याची खात्री करून घेण्याकरिता विमानात अनेक प्रकारची साहाय्यक उपकरणे असतात [→ विमानातील उपकरणे]. एंजिनाची अवस्था, त्याच्या आत असणारा दाब, त्यामधील इंधनाची परिस्थिती म्हणजे एंजिनाला होणाऱ्या इंधन पुरवठ्याची त्वरा, संचय टाकीमध्ये उपलब्ध असणारा इंधनाचा साठा इ. गोष्टींबद्दलची माहिती या उपकरणांद्वारे मिळते. विमानामधून प्रत्यक्ष क्षितिज अनेक वेळा दिसणे शक्य होत नसल्यामुळे विमानामध्ये कृत्रिम क्षितिज उपलब्ध करून दिलेले असते. याकरिता विमानाची एक प्रतिकृती या कृत्रिम क्षितिजावर अशा प्रकारे दाखविली जाते की, विमानाची प्रत्यक्ष क्षितिजाशी असलेली सापेक्ष स्थिती हुबेहुब दिसते. विमानामध्ये एक घूर्णी योजना प्रस्थापित करून तिच्याद्वारे कृत्रिम व प्रत्यक्ष क्षितिज हे एकमेकांशी सतत समांतर राहतील, अशी व्यवस्था केलेली असते. विमानाच्या अग्रगामी संचारणामुळे निर्माण होणारा हवेचा दाब एका उपकरणाच्या साहाय्याने मोजला जातो. या दाबामुळे विमानाला उत्थान (वर उचलणारी) प्रेरणा मिळत असते. त्यामुळे हा दाब जर एका किमान मूल्याच्यापेक्षा कमी झाला, तर विमानाच्या गतीत अस्थैर्य येऊ शकते. हा दाब मापून विमानाचा बाह्य हवा सापेक्ष वेग मिळविला जातो. विमान जेव्हा वळत असते तेव्हा त्याच्या वळण घेण्याच्या त्वरेचे मापन करण्याकरिता एक घूर्णी यंत्र योजना उपलब्ध असते. विमानाच्या यांत्रिक कार्यात जर कोठेही बिघाड झाला, तर त्याबद्दल वैमानिकाला आगाऊ पूर्व सूचना देणारी पण उपकरणे असतात. विशेष महत्त्वाच्या यंत्राचे कार्य कसे चालले आहे याबद्दलच्या माहितीचे निर्देशन ऋण किरण दोलनदर्शकावर [→ इलेक्ट्रॉनीय मापन] करण्याची सोयसुद्धा विमानात असते.
वाहतूक नियंत्रण : हवाई प्रवास अंतर्देशीय, तसेच आंतरराष्ट्रीय असू शकतो. त्यासाठी आंतरराष्ट्रीय नागरी विमानचालन संघटनेकडून नियम ठरविले जातात. जसजशी विमानांची संख्या व विमानांची गती अधिक होत चालली, विमानांचा पल्ला दीर्घ होऊ लागला तसतसे त्यांवर योग्य नियंत्रण ठेवण्याची व्यवस्था करणे प्राप्त झाले. हे नियंत्रण विमान एका विमानतळावरून निघाल्यापासून जमिनीवर व हवेत असताना इच्छित स्थळी पोहोचेपर्यंत ठेवावे लागते. [→ वाहतून नियंत्रण].
वैमानिकीय नकाशे : वैमानिकीय मार्गनिर्देशनासाठी साधे नकाशे अपुरे पडू लागल्याने अधिक माहिती देणारे नवीन नकाशे तयार करणे अवश्य झाले. ह्या नकाशांत वापरलेले मापप्रमाण १: २,५०,००० अथवा १ : ५,००,००० घेतले गेले. हे नकाशे बहुशः लँबर्ट प्रक्षेपण वापरून बनवितात. पहिल्या प्रकारात विमानतळाच्या परिसरातील अधिक सविस्तर माहिती देतात. आणि दुसऱ्या प्रकारात लांबच्या मार्गावरील माहिती उपलब्ध होते. या नकाशांवर सांकेतिक खुणांनी विमानतळ कोणत्या प्रकारचा आहे, त्यावर काय सुविधा आहेत, तळाची समुद्रसपाटीपासूनची उंची, जवळचे डोंगर, पर्वत शिखरे, तलाव, नद्या, आगगाडीचे मार्ग, दूरध्वनीच्या व विद्युत् प्रेषणाच्या तारा, मार्गाजवळील इतर अडथळे इ. दाखविले जातात. दुसऱ्या प्रकारच्या नकाशांत विमानतळावर असलेल्या मार्गनिर्देशनाच्या सुविधांची माहिती मिळते. वैमानिकास फार नकाशे बरोबर न्यावे लागू नयेत म्हणून वैमानिक विमानतळाजवळच्या भागासाठी १ : २,५०,००० या मापप्रमाणाचे नकाशे जवळ बाळगतो आणि बाकीच्या मार्गासाठी १ : ५,००,००० मापप्रमाणाचे नकाशे वापरतो. ध्रुवीय प्रदेशाच्या नकाशांसाठी प्रक्षेपण पद्धतीत काही फरक करणे अवश्य होते.
आधुनिक काळात रेडिओ, रडार आदींच्या साह्याने चढण्याउतरण्यासाठी आणि मार्गातील स्थाननिश्चिती करण्यासाठी निरनिराळ्या सुविधा प्राप्त झाल्याने वैमानिकास वरील वर्णन केलेल्या नकाशांची आवश्यकता कमी वाटू लागली आहे. आता त्याऐवजी सर्व प्रमुख विमानतळाचे रेडिओ मार्गनिर्देशक तक्ते व अभिगम तक्ते मिळू लागले आहेत, त्यांचा उपयोग करतात. विमानतळावरील प्रत्येक धावपट्टीसाठी व रेडिओ मार्गनिर्देशक साधनासाठी निराळे नकाशे बनविण्यात आले आहेत.
विमानतळ : प्रारंभिक काळात जड विमानाचे आकारमान लहान असे आणि त्यांचा चढण्या-उतरण्याचा व हवेतील प्रवासाचा वेग कमी असे. त्यांच्या चढण्या-उतरण्यास मोकळे व समपातळीत असणारे सु. ३०० मी. लांबी-रूंदीचे पटांगण पुरेसे होत असे. चढता-उतरताना विमानांचा जमिनीसापेक्ष वेग कमी असेल, तर तिरक्या प्रमाणात लहान पटांगणात विमानाची चढउतार शक्य होते. त्यासाठी विमानाची चढउतार शक्यतो वाऱ्याच्या विरुद्ध दिशेने करण्यात येते. वाऱ्याची दिशा समजण्यासाठी एका खांबीवर कापडी शंकूचा बनविलेला पवन दिशादर्शक लावण्यात येई अगर जमिनीवर केलेल्या धुरामुळे वाऱ्याची दिशा वैमानिकास कळून येत असे. विमानाचे आकारमान, वजन व वेग जसजसे वाढत गेले तसतशी विमान चढण्या-उतरण्याची जागा अधिक मोठी व मजबूत करावी लागली. सबंध मोठे पटांगण मिळणे कठीण व ते मजबुत करणे अती खर्चाचे होते म्हणून धावपट्ट्या बांधण्यात आल्या. धावपट्ट्यांची दिशा ठरविताना तेथे वारा बहुतांशी कोणत्या दिशेने असतो, जवळपास टेकड्या आदी अडथळे काय आहेत, हे विचारात घेऊन त्या बांधण्यात आल्या. विमानावर काम करण्यासाठी धावपट्ट्यांपासून दूर असे तबेले बांधण्यात आले. तसेच विमानातील प्रवासी, माल व टपाल यांची चढउतार करण्यासाठी इमारती बांधण्यात आल्या. या तबेल्यांच्या व इमारतींच्या समोर विमाने उभी करण्यासाठी व त्यांची हालचाल करण्यासाठी भरपूर मोकळी जागी बांधण्यात आली. या जागेपासून धावपट्टीपर्यंत चालनमार्ग तयार करावे लागले.
विमानांची जमिनीवर हालचाल होत असता त्यांची दुसऱ्या विमानांशी, वाहनांशी अथवा इतर कशाशीही टक्कर होऊ नये यासाठी विमाने, वाहने आदींचे नियंत्रण करणे आवश्यक झाले. तसेच विमानतळाच्या आसमंतात उडणाऱ्या विमानांचे नियंत्रण करणे आवश्यक झाले. हे नियंत्रण विमानतळ नियंत्रकातून होते. प्राथमिक काळात हे काम निशाणे, रंगीत दिवे व व्हेरी पिस्तुलांनी (ई. आय्. व्हेरी या अमेरिकन संशोधकांच्या नावाने ओळखण्यात येणाऱ्या खास पिस्तुलांनी) विविधरंगी प्रकाशाद्वारे संदेश देणाऱ्या गोळ्या उडवून करण्यात येई. आधुनिक काळात विमानांची संख्या व वेग तसेच प्रवासी, माल, टपाल इ. नेण्याची क्षमता फारच मोठी झाल्याने त्यांवर कडक नियंत्रण ठेवावे लागते. त्यासाठी विमानावर व तळावर अद्ययावत उपकरणे बसवावी लागली आहेत. इतकेच नव्हे, तर विमानप्रवासाच्या आरंभापासून इष्ट जागी पोहोचेपर्यंत हे नियंत्रण आवश्यक झाले आहे.
विमान नियंत्रण : विमानाच्या नियंत्रणाचे चार विभाग आहेत : (१) विमानतळावरील व साधारणतः ८ किमी. परिसरातील नियंत्रण विमानतळ नियंत्रकाच्या अधिकारात असते. (२) त्यापुढील ४० ते ८० किमी. पर्यंतचे नियंत्रण अभिगम नियंत्रकाच्याकडे असते. (३) तेथून १५० ते २५० किमी. पर्यंतचे नियंत्रण प्रादेशिक नियंत्रकाच्या आदेशानुसार चालते. (४) त्यापुढील प्रवासाचे नियंत्रण उड्डाण माहिती विभाग केंद्राकडून येणाऱ्या माहितीनुसार व विमान दुसऱ्या माहिती केंद्राच्या कक्षेत जाईपर्यंत होते. हे नियंत्रण रेडिओद्वारे केले जाते.
वैमानिकाला त्याच्या वेळोवेळीच्या तात्कालिक स्थाननिश्चिती करिता रडार, दिक्सूचक रेडिओ शलाका केंद्रे व अतिउच्च कंप्रता व्यापक परास शलाका प्रणाली आदींचे साहाय्य होते. यांचे वर्णन पुढे केले आहे.
उड्डाण आखणी : प्रथम आरंभ स्थानापासून अंतिम स्थानाकडे जाण्याचा मार्ग ठरविणे आवश्यक असते. मार्ग ठरविताना अनेक गोष्टींचा साकल्याने विचार करावा लागतो. मार्ग ठरविताना वाटेत येऊ शकणारे नैसर्गिक अडथळे, राष्ट्रीय व आंतरराष्ट्रीय निर्बंध, विमानाची उड्डाणक्षमता यांचा विचार करावा लागतो. नैसर्गिक अडथळ्यात डोंगर, पर्वत व हवामान यांचा प्रामुख्याने अंतर्भाव होतो. हवामानाचा विचार करताना आरंभ स्थान, वाटेतील व अंतिम स्थानी पोहोचण्याच्या वेळी अपेक्षित हवामान यांचा विचार आवश्यक होतो. दृश्यमानता, मोठाली वादळे, संक्षोभ (ज्यातील स्थानिक वेग व दाब अनियमितपणे बदलत राहतात अशी हवेची गती), धुके, ढग, पाऊस, हिमवर्षाव, तडिताघात, हवेचे तापमान व वाऱ्यांची निरनिराळ्या उंचीवरील दिशा व वेग हे विचारात घ्यावे लागतात. [→ वैमानिकीय वातावरणविज्ञान].
मार्ग ठरविताना इंधनाचा विचार फार महत्त्वाचा आहे. इंधन कमीत कमी खर्च व्हावे, त्याचे कमीत कमी मूल्य द्यावे लागावे आणि त्या विमानाला लागणारे विशिष्ट प्रकारचे इंधन वाटेत सहज उपलब्ध असावे ह्याकडे लक्ष द्यावे लागते. अनावश्यक इंधन वाहून नेल्यास विमानातील माल अथवा प्रवासी कमी करावे लागतात व त्यामुळे प्रवासखर्च वाढतो.
राष्ट्रीय व आंतरराष्ट्रीय निर्बंध : आंतरराष्ट्रीय संमतीने प्रत्येक राष्ट्राच्या भूमीवरील व भूमीजवळील सागर सीमेवरील वातावरणात त्या त्या राष्ट्राचे अनिर्बंध स्वामित्व मान्य केले आहे. प्रत्येक राष्ट्र त्यावरील विमान उड्डाणाविषयीचे कायदे व नियम ठरविते पण ते शक्यतोवर आंतरराष्ट्रीय नागरी विमानचालन संघटनेने (आ. ना. वि. सं.) मान्य केलेल्या नियमांनुसार केले जातात.
राष्ट्रे निरनिराळ्या कारणांसाठी आपल्या काही भागांत विदेशी व राष्ट्रीय विमानांच्या उड्डाणास मनाई करतात. या कारणांमध्ये पुढील कारणे प्रामुख्याने येतात : (१) राष्ट्रीय सुरक्षितता : उदा., सैनिक, नाविक व हवाई सेनांचे तळ आणि त्यांच्या राखीव जागा. तसेच अवकाशयाने, क्षेपणास्त्रे इत्यादींची क्षेपण स्थळे. (२) शासकीय विशिष्ट स्थाने : उदा., राष्ट्रपतिभवन व (३) धार्मिक स्थळे : उदा., पारशी लोकांचा मुंबईतील दख्म (स्मशानभूमी).
यांशिवाय उरलेल्या भागावर विमानचालनावर काही निर्बंध असू शकतात. काही राष्ट्रे स्वनातीत वेगाने (ध्वनीच्या वेगापेक्षा जास्त वेगाने) विमानचालनास पूर्णपणे अथवा विशिष्ट भागावर मनाई करतात कारण त्यामुळे भूमीवरील इमारतींची मोडतोड आणि मानव व पशू यांस धोका होऊ शकतो. काही राष्ट्रांनी विशिष्ट भूभागावर कमीत कमी उंचीची अट ठेवली आहे.
विमानाचे उड्डाण त्रिमितीत होऊ शकते त्यामुळे त्यावर दुसऱ्या विमानाशी टक्कर होऊ नये म्हणून विशेष नियम व उपाय योजावे लागतात. जहाजाप्रमाणेच रात्रीच्या वेळी व दृश्यमानता कमी असेल तेव्हा गतिमान विमानावर हिरव्या, तांबड्या व पांढऱ्या रंगाचे दिवे लावावे लागतात. हे दिवे पंखाच्या टोकाशी आणि विमानाच्या मागील टोकावर बसविलेले असतात. त्याशिवाय विमानाच्या खालच्या व वरच्या बाजूंस लुकलुकणारे दिवे लावतात. लुकलुकणाऱ्या दिव्यांनी दुसऱ्या वैमानिकाचे व इतरांचे लक्ष वेधले जाते.
विमाने चालविण्याचे मार्ग प्रत्येक राष्ट्राने आ. ना. वि. सं. च्या संमतीने ठरविले आहेत. वैमानिकाला विमान कोणत्या उंचीवरून न्यावयाचे हे ठरवावे लागते. हे ठरविताना तो निरनिराळ्या उंचींवरून अनुकूल वातप्रवाहाची मदत घेतो. कारण उंचीवरील वाऱ्याचा वेग १००–२०० किमी. ही असू शकतो. दुसऱ्या विमानाशी टक्कर होऊ नये यासाठी आ. ना. वि. सं. ने ठरविलेल्या नियमांनुसार उंची निवडावी लागते.
स्थाननिश्चिती : कोणादर्श : हवाई मार्गनिर्देशनामध्ये स्थाननिश्चितीकरिता उदग्र कोणादर्शाचा उपयोग केला जातो. या कोणादर्शामध्ये पाणसळीची सोय असल्याने प्रत्यक्ष क्षितिज दिसत नसेल तेव्हाही कृत्रिम क्षितिजापासूनचा कोन मोजता येतो. हल्लीच्या शीघ्र गतीच्या विमानांत त्याचा सहसा उपयोग होऊ शकत नाही.
दिक्सूचक: विमानांत चुंबकीय दिक्सूचकाचा उपयोग केला जातो. हा दिक्सूचक जहाजाच्या दिक्सूचकापेक्षा भिन्न असतो. तथापि त्याच्या वापराचे तत्त्व एकच असते. काही विमानांत चुंबकीय दिक्सूचकावर विमानातील लोहमय वस्तूंचा, तसेच विद्युत् प्रवाहाचा परिणाम टाळण्यासाठी स्त्रोतद्वार दिक्सूचक वापरले जातात. हे उपकरण विमानाच्या पंखांच्या टोकात अथवा शेपटीजवळ बसवितात. या उपकरणाच्या अक्षातून जाणाऱ्या बाह्य चुंबकीय क्षेत्राच्या परिणामानुसार चालकाला संदेश मिळत राहतो आणि त्यास चुंबकीय दिशा कळते.
रेडिओ दिक्सूचक अथवा स्वयंचलित दिशाशोधक : हे उपकरण विमानावर बसविलेले असते. यास भूमीवरील कोणत्याही ज्ञात अखंडित रेडिओ तरंग प्रेषकाशी मेलित केल्यास (दोहोंची कंप्रता समायोजनाने मिळती जुळती केल्यास) निरीक्षकास प्रेषकाची विमानसापेक्ष दिशा कळते. यासाठी १९० ते १,७५० किलोहर्ट्झ कंप्रतेचे कोणतेही रेडिओ प्रेषक केंद्र उपयोगी पडते.
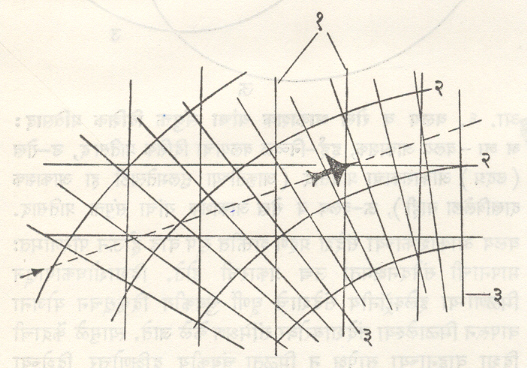
घ्रुवीय मार्गनिर्देशन : घ्रुवाजवळील प्रदेशात हवाई मार्गनिर्देशनासाठी मागे जलपृष्ठावरील मार्गनिर्देशनात वर्णिल्याप्रमाणे नेहमीचे मर्केटर अथवा लँबर्ट प्रक्षेपणाने बनविलेले नकाशे किंवा तक्ते व चुंबकीय दिक्सूचक उपयोगी पडत नाहीत. या प्रदेशाच्या नकाशासाठी मर्यादित प्रमाणात वापरता येतील अशी निरनिराळे प्रक्षेपणे उपयोजितात. उदा., घ्रुवीय त्रिमितीय चित्रात्मक प्रक्षेपण, अनुप्रस्थ मर्केटर प्रक्षेपण, परिवर्तित लँबर्ट अनुरूपी प्रक्षेपण इत्यादी. आ. ४ मध्ये उत्तर ध्रुवाच्या परिसरातून जाणाऱ्या विमानाचा जालक तक्त्यावरील प्रत्यक्ष गतिमार्ग दाखविला आहे.
विमान स्वयंचालक योजना : विमान इच्छित उंचीवर पोहचून इच्छित दिशेने जाऊ लागल्यावर मानवी नियंत्रणाला पर्याय म्हणून विमान स्वयंचालक (ऑटोपायलय) उपयोगात आणता येतो. विमान एका विवक्षित दिशेत मार्गक्रमण करीत असते तेव्हा त्याच्या गतीत तीन प्रकारचे विक्षोभ किंवा विकृती निर्माण होऊ शकतात. विमानाच्या दोन बाजूंच्या पंख्यांवर कार्य करणाऱ्या उत्प्रणोदाच्या (पंखाला ऊर्ध्वदिशेत रेटणाऱ्या प्रेरणांच्या) मूल्यात फरक पडल्यामुळे म्हणा वा इतर काही कारणांमुळे ते काही वेळा गतिदिशेच्या अक्षाभोवती डोलावयास लागते (उदा., समुद्रात चालणारे जहाज जसे दोन्ही बाजूंस डोलते त्याप्रमाणे). विमानाच्या पंख्याच्या मागील बाजूचा लहानसा भाग पंखाला बिजागरीने जोडलेला असतो. तो खालीवर करून हे दोलन मर्यादित करता येते. गतिदिशेच्या ऊर्ध्व लंबाभोवती (गतीच्या प्रतलात बदल न करता) गतिदिशेपासून विचलित होऊन विमान काही वेळा नागमोडी हालचाल करू लागते (सपाट रस्त्यावर चालणाऱ्या मोटारीला सुद्धा अशा प्रकारची नागमोडी गती मिळताना आढळते). गतीमध्ये या प्रकारे निर्माण होणाऱ्या विकृतीचा निरास सुकाणू नियंत्रकाद्वारे करता येतो. विमानाच्या गतीतील झुकाव या तिसऱ्या प्रकारच्या विकृतीमध्ये विमानाचे नाक खालीवर होत असते म्हणजेच विमान गतिदिशेच्या क्षैतिज (गतीच्या प्रतलामधील) लंबाच्या अक्षाभोवती आंदेलन करते. या विकृतीचा निरास विमानातील उच्चालकाच्या साहाय्याने करता येतो. या तीन प्रकारांच्या विक्षोभांमुळे काही परिस्थितीत विमानाच्या स्थैर्यावर परिणाम होऊन त्यामध्ये विचलन होते. रेडिओ दिक्सूचकासारख्या योजनेला नियंत्रण ⇨ सेवायंत्रणेची मदत दिली असता विमानाची गतिदिशा इष्ट दिशेकडे वळवून ते त्याच दिशेने अचूकपणे सतत जात राहील, अशी स्वयंचलित व्यवस्था करता येते, तसेच ते एका ठराविक उंचीवर उडत राहील अशी व्यवस्था करता येते. अशा व्यवस्थेस स्वयंचालक योजना असे म्हणतात. विमान स्वयंचालकाच्या नियंत्रणाखालून काढून घेऊन वैमानिक परत आपल्या हाती केव्हाही घेऊ शकतो.
विमानाचा वेग काढण्याची पद्धती : विमानावर हवासापेक्ष वेगदर्शक हे उपकरण बसविलेले असते. विमान उडत असता या उपकरणाने दाखविलेल्या वेगात त्रुटी असतात. प्रथम उपकरणातच काही त्रुटी असतात, तसेच उपकरण बसविताना काही त्रुटी उत्पन्न होतात आणि तिसरी त्रुटी विमानाच्या उंचीवरून चालण्यामुळे उत्पन्न होते. या त्रुटींचा निरास केल्यावर विमान हवेतून किती वेगाने चालत आहे हे समजू शकते. अर्थातच विमान उडत असलेल्या स्थळी हवाही कोणत्या तरी दिशेला विशिष्ट वेगाने वहात असू शकते. तसेच तेथील हवेचा दाब व तापमान यांचाही परिणाम होतो. त्यामुळे या उपकरणाने दाखविलेला वेग व प्रत्यक्ष भूसापेक्ष वेग यांत फरक पडतो. [→ विमानातील उपकरणे]. विमान वेग काढण्याकरिता डॉप्लर परिणामाचा उपयोग ही एक आधुनिक पद्धत आहे. या पद्धतीमध्ये विमानामधून ठराविक कंप्रतेचा एक रेडिओ संदेश प्रेषित केला जातो. जमिनीच्या (किंवा आसमंतात असणाऱ्या टेकड्या इत्यादींच्या) सापेक्ष विमानाला वेग असतो त्यामुळे प्रेषित केलेले रेडिओ तरंग जेव्हा परावर्तित होतात तेव्हा त्यांच्या कंप्रतेत या वेगानुसार बदल झालेला आढळतो. परावर्तित रेडिओ तरंगाच्या कंप्रतेचे मापन केले असता त्यापासून विमानाचा वेग मिळविता येतो.
आधुनिक काळात हवाई, तसेच जलीय व इतर मार्गनिर्देशनासाठी वापरण्यात येणारी काही इलेक्ट्रॉनीय साधने, उपकरणे व प्रणाली यांचे संक्षिप्त वर्णन खाली दिले आहे.
मार्गनिर्देशनाची इलेक्ट्रॉनीय साधने : आधुनिक काळात वाहनाच्या मार्गनिर्देशनाकरिता इलेक्ट्रॉनीय साधनाचा अथवा रेडिओ आधारित पद्धतींचा फार मोठ्या प्रमाणात उपयोग केला जातो. वाहनाच्या गतीविषयी संपूर्ण ज्ञान हवे असले, तर त्याकरिता पुढील गोष्टी माहिती असाव्या लागतात : (१) वाहनाची गतिदिशा, (२) वाहनाचा तात्कालिक वेग व (३) वाहनाचे तात्कालिक स्थान अथवा त्याचे ज्ञात स्थानापासूनचे अंतर.
वाहनाची गतिदिशा : ही काढण्याकरिता ज्या विविध पद्धती उपलब्ध आहेत त्यांचे वर्णन पुढे येईल. या पद्धतीचे वर्गीकरण खालीलप्रमाणे करता येते : दिशिक (एखाद्या विशिष्ट दिशेत अधिक परिणामकारक असलेल्या) रेडिओग्राही योजना : (१) परिभ्रमी वलय, (२) रेडिओ दिक्सूचक, (३) भूस्थित दिशाशोधक दिशिक रेडिओ प्रेषण योजना : (१) परिभ्रमी शलाका, (२) द्विसंदेशशलाका योजना (रेडिओ परिक्षेत्र योजना) इलेक्ट्रॉनीय दिशाशोधकामध्ये वलय आकाशकाचे (संवाहकाच्या एक अगर अधिक वेढ्यांनी बनलेल्या दिशिक प्रकारच्या आकाशकाचे) तत्त्व वापरलेले असते. अशा आकाशकाची दोन टोके संवेदनशील संदेशमापक यंत्रास जोडून ते रेडिओ तरंग प्रेषित करणाऱ्या प्रेषकाच्या दिशेत ठेवून त्याचे प्रतल उदग्र अक्षाभोवती फिरविले, तर ग्रहण केलेल्या संदेशाच्या मूल्यात फरक पडतो, जेव्हा आकाशकाच्या प्रतलाला काढलेला लंब रेडिओ तरंगाच्या प्रेषण दिशेत असतो तेव्हा संदेशमूल्य महत्तम असते आणि रेडिओ तरंग प्रेषण दिशेच्या लंब दिशेत प्रतलाला काढलेला लंब असतो तेव्हा त्यामध्ये मिळणाऱ्या संदेशांचे मूल्य शून्य असते. संदेशमूल्य ज्या अवस्थेत लघुतम होते त्याच्या निश्चितीने प्रेषक केंद्राची दिशा ठरविली जाते. अशा प्रकारे प्रेषक केंद्राची दिशा समजली, तरी केंद्र आकाशकाच्या कोणत्या बाजूस आहे किंवा त्याचा रोख कोणीकडे आहे याविषयी माहिती मिळत नाही. ही अतिरिक्त किंवा जास्तीची माहिती मिळविण्याकरिता वलय आकाशकास एक सरळ उदग्र आकाशक जोडला जातो. मूळ वलय आकाशक व अतिरिक्त आकाशक यांमध्ये ग्रहण केलेल्या संदेशांत १८०० एवढा फरक राहील अशी व्यवस्था केलेली असते. या संयुक्त आकाशकाचा प्रतिसाद आ. ६ मध्ये दाखविल्याप्रमाणे होतो. प्रत्यक्ष प्राथमिक प्रयोग करून कोठल्या बाजूस रेडिओ प्रेषक केंद्र असता प्रतिसाद कमी मूल्याचा होतो हे पाहिले असता प्रयोगाने आढळणाऱ्या परिस्थितीनुसार प्रेषक केंद्राची बाजू व दिशा ठरविता येते. अशा प्रकारच्या दिशा निश्चितीमध्ये अचूकतेचे प्रमाण १० ते २० असते.
रेडिओ दिक्सूचक योजनेमध्ये ठराविक स्थानावरून एक किंवा एकापेक्षा अधिक, अखंडितपणे रेडिओ तरंग प्रेषित करणारी प्रेषक केंद्रे असतात. वाहनावर असलेल्या आकाशक योजनेच्या साहाय्याने त्यांच्या दिशा निश्चित केल्या जातात.
 स्वयंचलित दिशाशोधक योजनेमध्ये फिरणाऱ्या वलय आकाशकाच्या आत ⇨ फेराइट आंतरक (गाभा) बसविलेला असतो. त्यामुळे वलय आकाशकाच्या संदेश ग्रहण शक्तीत खूप वाढ होऊन परिणामतः मापनाची संवेदनक्षमता उच्च प्रकारची होते. दिशाशोधकापासून मिळणाऱ्या इलेक्ट्रॉनीय संदेशाचे घूर्णी चुंबकीय दिक्सूचन योजना वापरून मिळालेल्या संदेशाबरोबर संमिश्रण केले जाते. त्यामुळे केंद्राची दिशा वाहनाच्या सापेक्ष न मिळता चुंबकीय दक्षिणोत्तर दिशेच्या सरळ सापेक्ष मिळते. यावरून वाहनाची गतीदिशा सरळ ठरविता येते.
स्वयंचलित दिशाशोधक योजनेमध्ये फिरणाऱ्या वलय आकाशकाच्या आत ⇨ फेराइट आंतरक (गाभा) बसविलेला असतो. त्यामुळे वलय आकाशकाच्या संदेश ग्रहण शक्तीत खूप वाढ होऊन परिणामतः मापनाची संवेदनक्षमता उच्च प्रकारची होते. दिशाशोधकापासून मिळणाऱ्या इलेक्ट्रॉनीय संदेशाचे घूर्णी चुंबकीय दिक्सूचन योजना वापरून मिळालेल्या संदेशाबरोबर संमिश्रण केले जाते. त्यामुळे केंद्राची दिशा वाहनाच्या सापेक्ष न मिळता चुंबकीय दक्षिणोत्तर दिशेच्या सरळ सापेक्ष मिळते. यावरून वाहनाची गतीदिशा सरळ ठरविता येते.
विशिष्ट कार्याकरिता उपयुक्त असे दिशाशोधकाचे अनेक प्रकार व्यवहारात उपलब्ध आहेत. त्यांपैकी काही प्रारंभिक प्रकारांचे वर्णन व कार्य पुढे दिले आहे.
भूस्थित दिशाशोधक : आकाशात उडणारे विमान किंवा समुद्रात काही अंतरावर प्रवास करीत असणारे जहाज यांच्या गतिदिशा निश्चित करण्याची आवश्यकता भूमीवर असलेल्या स्थानकाला बऱ्याचदा पडते. या कार्याकरिता जी योजना वापरतात तीमध्ये दक्षिणोत्तर व पूर्व-पश्चिम दिशांत (अशा परस्पर लंब दिशांत) असणारे दोन स्थिर वलय आकाशक वापरतात आणि ते कोनमापक योजनेत असणाऱ्या दुसऱ्या दोन अशाच वलय आकाशकांशी संबंधित असतात. या दोन आकाशकांमध्ये एक फिरविता येण्याजोगता असे एक शोध किंवा एषण वलय अथवा वेटोळे ठेवलेले असते. हे एषण वलय फिरवून लघुतम संदेशमूल्य परिस्थिती आणली असता त्यापासून इष्ट दिशा निश्चित करता येते.
लक्ष्यानुगामी प्रयुक्ती : या प्रकारची योजना वाहन इष्ट दिशेत मार्गक्रमण करीत आहे किंवा नाही याविषयी खात्री करून घेण्याकरिता वैमानिक वापरतात. यात विमानाच्या धडाभोवती गुंडाळलेले एक स्थिर वलय असते. विमानाच्या मागची व पुढची टोके जोडणारी रेषा व वलय दिशा या एकमेकींशी ९०० कोन करतात. वलय आणि रोख आकाशक यांची जोडणी परिवर्तनीय स्वीचच्या साहाय्याने बदलता येते. त्यामुळे रोख संदेशाची दिशा पाहिजे तशी बदलता येते.
त्रुटी वा दोष : इलेक्ट्रॉनीय दिशाशोधक पद्धतीत काही त्रुटी अथवा दोष निर्माण होण्याचा संभव असतो. त्यांपैकी काही महत्त्वाच्या दोषांचे विवेचन खाली केले आहे.
(अ)रात्र परिणाम : दिशाशोधक पद्धतीमध्ये सामान्यपणे २००–५०० किलोहर्ट्झ कंप्रतेचे रेडिओ तरंग वापरले जातात. मापनामध्ये जरी भूमीगामी तरंगांचा उपयोग केला गेला असला, तरी काही तरंग ऊर्जा अवकाशाकडे प्रगत होऊन तिचे आयनांबराकडून (संपूर्ण पृथ्वीभोवतील ८० ते ३०० किमी. उंचीमधील विद्युत् संवाहक हवेच्या प्रावरणाकडून) परावर्तन होत असते. परावर्तित तरंग जेव्हा पृथ्वीतलाजवळ येतात तेव्हा त्यांचे भूमीगामी तरंगांबरोबर व्यतिकरण (अनिष्ट मिश्रण) होऊन त्यामुळे वलय आकाशकाच्या दिशिक प्रतिसादात विक्षोभ निर्माण होतो. रात्रीच्या वेळी आयनांबर पृथ्वीच्या पृष्ठभागाच्या जास्त जवळ सरकत असल्यामुळे निर्माण होणाऱ्या वरील परिणामाची तीव्रता अशा वेळी जास्तच असते. ॲडकॉकसारखे विशिष्ट प्रकारचे आकाशक [ → आकाशक] वापरले असता या दोषाचे प्रमाण बरेच कमी करता येते.
(आ)वातावरणीय प्रणमन : (प्रणमन म्हणजे तरंग एका माध्यमातून दुसऱ्या माध्यमात शिरताना त्याच्या दिशेत होणारा बदल). प्रेषक केंद्रापासून निघणारे रेडिओ तरंग जर पृथ्वीतलाबरोबर कोन करीत असतील, तर ते दिशाशोधक उपकरणापर्यंत येईतोपर्यंत भिन्न घनता, तापमान व आर्द्रता आसणाऱ्या हवेच्या निरनिराळ्या स्तरांमधून प्रवास करीत असल्यामुळे त्यामध्ये प्रणमन होऊन त्याची प्रसारण दिशा पृथ्वीच्या पृष्ठभागाकडे जास्त झुकते. हवेच्या स्तरांमध्ये नियमाच्या विरूद्ध तापमान बदल होऊन त्यांमध्ये परिस्थितीमुळे प्रत्यक्ष पर्यसन (नेहमीप्रमाणे उंचीनुसार हवेच्या स्तरांचे तापमान कमी होत न जाता ते वाढत जाणे) झाले, तर रेडिओ तरंगाकरिता वाहिनीमार्ग तयार होऊन त्यांच्या गतिमार्गात मोठ्या प्रमाणात बदल होऊ शकतो.
(इ) भूपरिणाम :रेडिओ तरंगातील ऊर्जेचा काही भाग पृथ्वीच्या पृष्ठभागाला भेदून काही अंतरापर्यंत (कंप्रतेनुसार काही सेंमी.) आत जातो. या प्रकारच्या रेडिओ तरंगांमुळे वातावरणामधून जाणाऱ्या तरंगाच्या दिशेत बदल होऊ शकतो. भूपृष्ठ व पाणी यांवरील रेडिओ तरंगाच्या प्रसारणामध्ये फरक असल्यामुळे याच प्रकारचा बदल किनाऱ्यानजीकच्या भूपृष्ठावरून प्रगत होणाऱ्या रेडिओ तरंगात पण आढळतो.
रेडिओ दिक्सूचक :या संज्ञेच्या निश्चित अर्थाबद्दल थोडी संदिग्धता आहे. जहाजावरील ग्राही वलय आकाशक योजना रेडिओ दिक्सूचक या नावाने निर्देशित केली जात होती. सध्या रेडिओद्वारे वाहनांचा दिक्-कोन दर्शविणाऱ्या कोणत्याही उपकरणास रेडिओ दिक्सूचक असे म्हटले जाते. याच व्यापक अर्थाने या संज्ञेचा उपयोग पुढील विवेचनात केला आहे.
सतत रेडिओ तरंग प्रेषित करणाऱ्या एका ठराविक प्रेषक केंद्राचा दिक्-कोन या उपकरणाच्या साहाय्याने दृश्य स्वरूपात प्रदर्शित केला जातो. ०–३६० या अंशांत अंशांकन केलेल्या तबकडीवर दिक्-कोन दाखविला जातो. वाहनावरील ग्राही वलयांच्या स्वरूपात असते व एका लहान विद्युत् चलित्राच्या (मोटरच्या) साहाय्याने तिचे एकसमान वेगाने परिभ्रमण करता येते. वाहनावरील ग्राहीचे इष्ट केंद्र कंप्रतेबरोबर मेलन केले असता तबकडीवर सरळ दिक्-कोन वाचता येतो. वाहनाचे केंद्रापासूनचे अंतर जर एका किमान मर्यादेपेक्षा कमी असेल, तरच हे मापन करता येते. अंतराची किमान मर्यादा प्रेषित केलेल्या रेडिओ तरंगाच्या शक्तीवर अवलंबून असते, हे येथे नमूद करणे आवश्यक आहे.
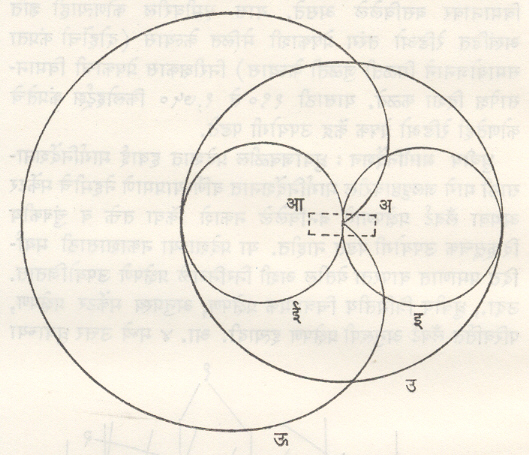
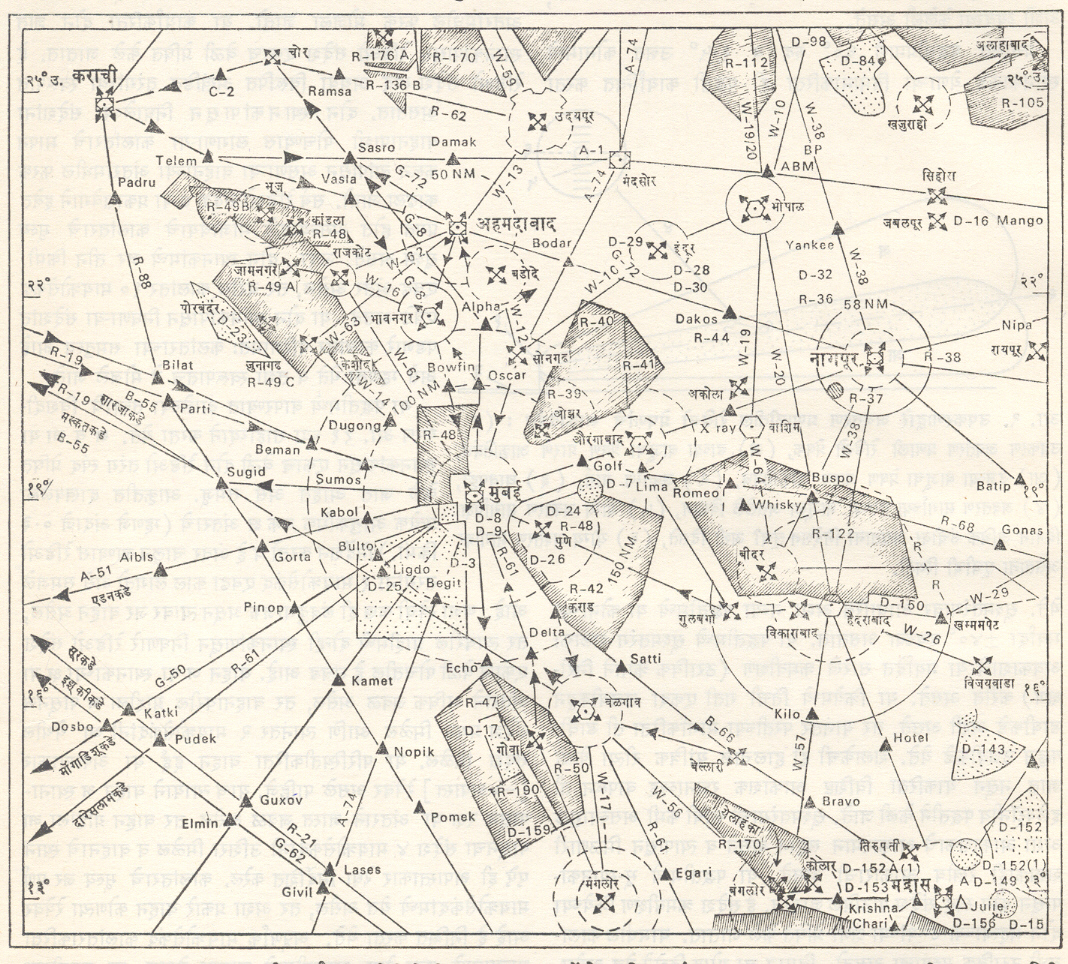
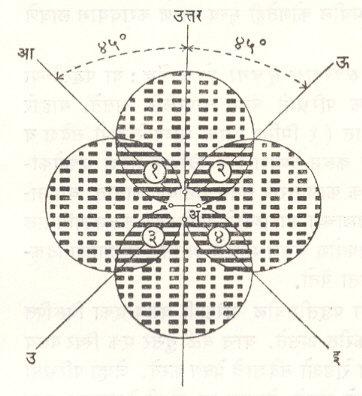 रेडिओ परिक्षेत्र योजना : या पद्धतीमध्ये भूमीवरील प्रेषकाकरिता वापरलेल्या आकाशकात परस्परांशी काटकोनात असणारी दोन वलये असतात. ही वलये रेडिओ संदेशाचे एकाच वेळी प्रेषण न करता एकमेकांनंतर कालक्रमाने रेडिओ तरंग प्रेषित करीत असतात. ठिपका व प्रास या मॉर्स संकेताच्या [→ तारायंत्रविद्या] स्वरूपात असलेला ‘A’ अक्षरी संदेश पहिल्या वलयामधून प्रेषित केला जातो, तर दुसऱ्या वलयामधून याच्याबरोबर उलट क्रमाने (म्हणजे प्रास व ठिपका या अनुक्रमाने)’ N’ अक्षरी संदेश पाठविला जातो. कोणत्याही एका वलयाने एका वेळी निरनिराळ्या दिशेत प्रेषित केलेल्या संदेशबलाचे निर्देशन ध्रुवीय आलेखाच्या स्वरूपात करता येते. दोन्ही वलयांकडून अशा प्रकारे होणाऱ्या परस्पर व्यापनामुळे निर्माण झालेल्या संदेशबलाच्या ध्रुवीय आलेखाचे स्वरूप आ. ७ मध्ये दाखविले आहे. आकृतीमध्ये (१) ते (४) क्रमांकांनी निर्देशिलेले विभाग हे सम संदेशमूल्याचे क्षेत्रविभाग आहेत. या विभागांच्या मध्यवर्ती रेषांच्या (म्हणजे अआ, अइ, अउ, अऊ) दिशेत ‘A’ व ‘N’ या संदेशांचे मिश्रण होऊन त्यामुळे एक अखंडित स्वरूपाचा असा ध्वनिस्वर निर्माण होऊन तो वाहनामध्ये असणाऱ्या ग्राही मंडल मध्यात ऐकू येतो. अ या स्थानकाकडे एक विमान यावयाचे आहे असे समजू या. इअ या रेषीय गतिमार्गाचा वापर करून विमान येऊ शकते. जोपर्यंत विमान याच रेषेत जात असते तोपर्यंत त्याच्या ग्राही मंडलात A व N संदेश समबल मिळतात. त्यामुळे त्यामध्ये एक सुस्पष्ट असा ध्वनिस्वर मिळतो. विमानाचा मार्ग जर या रेषेपासून विचलित झाला, तर विचलनाच्या दिशेनुसार त्यावर A आणि N यांपैकी एक संदेश जास्त प्रबल होतो. त्यामुळे विमानाच्या ग्राहीमध्ये मिळणाऱ्या ध्वनिस्वराच्या स्वरूपात फरक पडतो व याचे अभिज्ञान (अस्तित्व ओळखणे) होऊ शकते. ग्राही मंडलात ऐकू येणाऱ्या संदेशाच्या साहाय्याने वैमानिकास कोणत्याही एका रेषेवर विमानाचा गतिमार्ग स्थिर ठेवून अशा प्रकारे अ हे स्थानक गाठणे शक्य होते.
रेडिओ परिक्षेत्र योजना : या पद्धतीमध्ये भूमीवरील प्रेषकाकरिता वापरलेल्या आकाशकात परस्परांशी काटकोनात असणारी दोन वलये असतात. ही वलये रेडिओ संदेशाचे एकाच वेळी प्रेषण न करता एकमेकांनंतर कालक्रमाने रेडिओ तरंग प्रेषित करीत असतात. ठिपका व प्रास या मॉर्स संकेताच्या [→ तारायंत्रविद्या] स्वरूपात असलेला ‘A’ अक्षरी संदेश पहिल्या वलयामधून प्रेषित केला जातो, तर दुसऱ्या वलयामधून याच्याबरोबर उलट क्रमाने (म्हणजे प्रास व ठिपका या अनुक्रमाने)’ N’ अक्षरी संदेश पाठविला जातो. कोणत्याही एका वलयाने एका वेळी निरनिराळ्या दिशेत प्रेषित केलेल्या संदेशबलाचे निर्देशन ध्रुवीय आलेखाच्या स्वरूपात करता येते. दोन्ही वलयांकडून अशा प्रकारे होणाऱ्या परस्पर व्यापनामुळे निर्माण झालेल्या संदेशबलाच्या ध्रुवीय आलेखाचे स्वरूप आ. ७ मध्ये दाखविले आहे. आकृतीमध्ये (१) ते (४) क्रमांकांनी निर्देशिलेले विभाग हे सम संदेशमूल्याचे क्षेत्रविभाग आहेत. या विभागांच्या मध्यवर्ती रेषांच्या (म्हणजे अआ, अइ, अउ, अऊ) दिशेत ‘A’ व ‘N’ या संदेशांचे मिश्रण होऊन त्यामुळे एक अखंडित स्वरूपाचा असा ध्वनिस्वर निर्माण होऊन तो वाहनामध्ये असणाऱ्या ग्राही मंडल मध्यात ऐकू येतो. अ या स्थानकाकडे एक विमान यावयाचे आहे असे समजू या. इअ या रेषीय गतिमार्गाचा वापर करून विमान येऊ शकते. जोपर्यंत विमान याच रेषेत जात असते तोपर्यंत त्याच्या ग्राही मंडलात A व N संदेश समबल मिळतात. त्यामुळे त्यामध्ये एक सुस्पष्ट असा ध्वनिस्वर मिळतो. विमानाचा मार्ग जर या रेषेपासून विचलित झाला, तर विचलनाच्या दिशेनुसार त्यावर A आणि N यांपैकी एक संदेश जास्त प्रबल होतो. त्यामुळे विमानाच्या ग्राहीमध्ये मिळणाऱ्या ध्वनिस्वराच्या स्वरूपात फरक पडतो व याचे अभिज्ञान (अस्तित्व ओळखणे) होऊ शकते. ग्राही मंडलात ऐकू येणाऱ्या संदेशाच्या साहाय्याने वैमानिकास कोणत्याही एका रेषेवर विमानाचा गतिमार्ग स्थिर ठेवून अशा प्रकारे अ हे स्थानक गाठणे शक्य होते.
(१) ते (४) या परस्परव्यापी विभागांना परास किंवा शलाका असे म्हणतात. विमान शलाका-मार्गावरच संचारण करते व ते त्यापासून विचलित होत नाही, याची खात्री करून घेण्याकरिता वरील पद्धतीला अशी एक दृक् पद्धत उपलब्ध आहे. दृक् पद्धतीमध्ये स्थानकाच्या प्रेषक प्रणालीमधील दोन आकाशकांमधून प्रेषित होणारे रेडिओ तरंग दोन भिन्न कंप्रतांनी (उदा., ६५ व ८५ हर्ट्झ) विरूपित [→ विरूपण] असे असतात. आकाशकापासून या दोन रेडिओ तरंगांचे प्रेषण मागे वर्णन केल्याप्रमाणे एकामागून एक अशा कालक्रमाने केले जाते. वाहनावरील ग्राहीमध्ये या दोन विरूपित संदेशांचे ग्रहण केले जाऊन त्यापासून मिळणारी दोन प्रदाने अनुक्रमे ६५ व ८५ हर्ट्झ कंप्रतेच्या दोन मेलित कंपनक दर्शकांस पुरविले जातात. विमान जर योग्य दिशेत जात असेल, तर ग्राहीत मिळणारे संदेश समबलाचे असतात व दोन्ही कंपनक एकसमान परमप्रसराने (सरासरी स्थितीपासून होणारे महत्तम स्थानांतरण एकसमान असते अशी) कंपने करताना दिसतात. याउलट वाहनांचे इष्ट गतिमार्गापासून विचलन झाले असल्यास यांपैकी एक कंपनक जास्त शक्तिशाली कंपने करताना दिसतो. स्थानकांमधील दोन आकाशकांना पुरविलेल्या रेडिओ संदेशांच्या बलात किंवा कलेत (काल दृष्ट्या विशिष्ट संदर्भाच्या सापेक्ष असणाऱ्या स्थितीत) फरक केला असता अवकाशामधील शलाकेच्या कोनीय अवस्थेत इष्ट तो बदल घडवून आणता येतो. आ. ७ मध्ये समबल संदेश रेषा दक्षिणोत्तर दिशेशी ४५० कोन करतात असे दाखविले आहे. वर नमूद केल्याप्रमाणे हा कोन बदलून त्यास ०० ते ३६0० यांमधील कोणतेही मूल्य धारण करावयास लावणे शक्य होते.
सर्वदिशिक अथवा सर्वपरास सूचना प्रेषक केंद्र : या पद्धतीच्या प्राथमिक स्वरूपात एक परिभ्रमी वलय वापरलेले असते. याद्वारे एका ठराविक कालखंडात (१ मिनिट) एक श्राव्य रेडिओ संदेश व दक्षिणोत्तर दिशेचे ज्ञान करून देणारा एक दिशिक संदेश एकमेकांमागून एक असे ठराविक कालांतराने सतत पाठविले जातात. वाहनावर असलेल्या ग्राही मंडलाच्या साहाय्याने त्यांचे ग्रहण करून त्यांमधील कालांतर घड्याळाचा उपयोग करून मोजले असता, वाहनाचा दिक्-कोन गणन करून काढता येतो.
आधुनिक काळात या पद्धतीमधील परिश्रमी वलय एका विरूपित रेडिओ तरंगाचे प्रेषण करीत असते. याच वेळी दुसरे एक स्थिर वलय याच कंप्रतेच्या विरूपित रेडिओ संदेशाचे प्रेषण करते. जेव्हा परिभ्रमी वेटोळ्याचे तोंड उत्तरेकडे असते, तेव्हाच या दोन्ही प्रेषणाच्या कला एकसमान मिळतील अशी या योजनेमध्ये व्यवस्था केलेली असते. परिभ्रमी वलय विद्युत् चलित्राच्या साहाय्याने सतत फिरविले जात असते व त्याची परिभ्रमण गती रेडिओ तरंगाच्या विरूपण कंप्रतेवर अवलंबून असते. वाहनावर असलेल्या ग्राहीच्या मदतीने दोन संदेशांमधील कलांतराचे (कलांमधील फरकाचे) मापन केले असता त्यापासून वाहनाच्या गतीचा रोख मिळविता येतो.
रेडिओ दिक्सूचक शलाका केंद्रे : केवळ विमानाच्याच मार्गनिर्देशनासाठी अशी अनेक रेडिओ शलाका केंद्रे भारतभर उभारली आहेत (पहा आ.१०). ही रेडिओ केंद्रे एका ठराविक कंप्रतेच्या संदेशाबरोबर आपला परिचय करून देणारी सांकेतिक अक्षरे पण सतत प्रसारित करीत असतात. विमानाजवळ असलेल्या ग्राहीचा आकाशक वलय पद्धतीचा म्हणजे दिशिक गुणधर्म असणारा असतो. मागे वर्णन केल्याप्रमाणे आकाशकाचा रोख रेडिओ केंद्राच्याकडे केला असता रेडिओग्राहीमध्ये ग्रहण केलेल्या संदेशाचे मूल्य महत्तम होते त्यामुळे विमानातून इष्ट केंद्र स्थानकाची दिशा निश्चित करणे सुलभ असते. उड्डाणापूर्वी वैमानिक आपल्या मार्गावर असणारी दिक्सूचक शलाका केंद्रे, त्यांच्या विशिष्ट कंप्रता व त्यांची परिचय सांकेतिक अक्षरे ही सर्व पाहून ठेवतो व उड्डाणकालात एकमेकांमागून एक अशी योग्य शलाका केंद्रे आपल्या ग्राहीवर मेलित करून त्यांनी दाखविलेल्या दिशेच्या अनुरोधाने जात राहतो. अशा रीतीने जमीन किंवा तारे दिसत असोत वा नसोत विमानाचा मार्ग चुकण्याचा संभव राहत नाही.
अतिउच्च कंप्रता व्यापक परास (अ. व्या. प.) शलाका प्रणालीमध्ये एक विशिष्ट तऱ्हेचे रेडिओ प्रेषक केंद्र जमिनीवर बसविलेले असते. या केंद्रातून एकाच वेळी दोन प्रकारचे प्रेषण सतत केले जाते. वलय व उदग्र आकाशक यांच्या संयुक्त प्रेषणापासून मिळणाऱ्या प्रारण (तरंगरूपी उर्जा) आकृतिबंधाप्रमाणे अ. व्या. प. केंद्रातून प्रेषित केलेल्या प्रारणाचा आकृतिबंध हृदयाकृती असतो. हा आकृतिबंध स्थिर नसून तो प्रती सेकंदाला ३० फेरे या एकसमान परिभ्रमण गतीने फिरत असतो. यामुळे परिणामी ३० हर्ट्झ कंप्रतेने परमप्रसर विरूपित संदेश [→ विरूपण] निर्माण होतो. केंद्रापासून प्रेषित केलेल्या मूळ संदेशाचे ३० हर्ट्झ याच कंप्रतेने कंप्रता विरूपित [→ विरूपण] केलेले असते. विमानामध्ये असलेले रेडिओ कंप्रता ग्राही प्रेषित वाहक कंप्रतेसाठी मेलित केलेला असतो. याच्या साहाय्याने परमप्रसर व कंप्रता विरूपण असे हे दोन संदेश पकडले जातात व त्यांमधील कलांतर मोजते जाते. जर विमान प्रेषक केंद्राच्या (चुंबकीय) उत्तर दिशेस असेल, तर या दोन संदेशांमधील कलांतर शून्य मूल्याचे असते, जर विमानाची गतीदिशा स्थानकाच्या पूर्वेस असेल, तर हे कलांतर ९०० होते. याप्रमाणे विमानाच्या प्रत्येक गतिदिशेनुसार ग्राहीमध्ये एक विशिष्ट मूल्याचे कलांतर मिळते अथवा मोजलेल्या कलांतरावरून विमानाची गतीदिशा कळून येते. कलांतराच्या मूल्यानुसार योग्य निर्देशकाद्वारे स्थानकाच्या सापेक्ष दिक्सूचक दिक्-कोन सरळ निर्देशित करण्याची योजना उपलब्ध असते.
 उपकरणद्वारे अवतरण प्रणाली : वातावरणातील दृश्यमानता जेव्हा चांगली नसते तेव्हा विमान जमिनीवर उतरण्याकरिता या प्रणालीचा उपयोग होतो. या प्रणालीचे तीन भाग आहेत : (१) अवतरणासाठी विमान धावपट्टीच्या दिशेनेच आले पाहिजे. यासाठी विशिष्ट सीमा दर्शकाचा उपयोग करतात. (२) विमान उतरताना ते धावपट्टीकडे फार उच्च अथवा फार स्वल्प कोन करून येऊ नये म्हणून ते विशिष्ट अवतरण कोनातून यावे यासाठी अवतरण मार्गदर्शकाने हा कोन दर्शविला जातो. (३) धावपट्टीच्या टोकापासून उतरणाऱ्या विमानाचे अंतर कळावे यासाठी चिन्हक शलाका असतात.
उपकरणद्वारे अवतरण प्रणाली : वातावरणातील दृश्यमानता जेव्हा चांगली नसते तेव्हा विमान जमिनीवर उतरण्याकरिता या प्रणालीचा उपयोग होतो. या प्रणालीचे तीन भाग आहेत : (१) अवतरणासाठी विमान धावपट्टीच्या दिशेनेच आले पाहिजे. यासाठी विशिष्ट सीमा दर्शकाचा उपयोग करतात. (२) विमान उतरताना ते धावपट्टीकडे फार उच्च अथवा फार स्वल्प कोन करून येऊ नये म्हणून ते विशिष्ट अवतरण कोनातून यावे यासाठी अवतरण मार्गदर्शकाने हा कोन दर्शविला जातो. (३) धावपट्टीच्या टोकापासून उतरणाऱ्या विमानाचे अंतर कळावे यासाठी चिन्हक शलाका असतात.
या पद्धतीत एकसारखी सुधारणा होत असून काही विमानतळांवर दृश्यमानता शून्य असताही जमिनीवरून संदेश पाठवून विमान सुखरूपपणे उतरविता येते. या प्रणालीत विमानतळापाशी असलेल्या दोन रेडिओ प्रेषकांपासून दोन दिशिक आकृतिबंध प्रेषित केले जातात. या दोन्ही प्रेषणाची वाहक कंप्रता एकच असली, तरी त्यांपैकी (येणाऱ्या विमानाच्या दृष्टीने) डाव्या बाजूच्या प्रेषणाचे परमप्रसर विरूपण ९० हर्ट्झ या कंप्रतेने केलेले असते, तर दुसऱ्या बाजूच्या प्रेषणाचे १५० हर्ट्झ या कंप्रतेने परमप्रसर विरूपण केलेले असते. आ. ९ मध्ये टिबांनी दाखविल्याप्रमाणे या दोन प्रेषणांचे आकृतीबंध परस्परव्यापी असतात. विमानातील ग्राहीमध्ये या दोन प्रेषण संदेशांची मूल्ये ज्या मार्गावर एकसमान होतात तो स्थानकाकडे येण्याकरिता योग्य पोचमार्ग असतो, अशी व्यवस्था केलेली असते.
 प्रचलित पद्धतीप्रमाणे ६०° रूंद व १·५° उन्नत कोनामध्ये स्थानकाकडे येणाऱ्या विमानाकरिता ही पद्धत कार्यान्वित करता येते. सूक्ष्मतरंगावर आधारित अशा नव्या पद्धतीमध्ये या कोनाच्या मर्यादा ± ४०° एवढ्या असतात. या पद्धतीमध्ये सूक्ष्मतरंग शलाका अवकाशाचे या मर्यादेत सारखे क्रमवीक्षण (ठराविक क्रमाने निरीक्षण) करीत असते. या क्रियेमध्ये तिची गती एकदा उजवीकडून डावीकडे अशी असते, तर यानंतर परतीच्या मार्गाकरिता ती डावीकडून उजवीकडे येते. शलाकेची ही हालचाल यांत्रिक रीत्या केली जात नसून याकरिता विशिष्ट आकाशक रचनाव्यूह वापरून ती इलेक्ट्रॉनीय पद्धतीने केली जाते. सूक्ष्मतरंगाची लांबी कमी असल्यामुळे अशा आकाशकाचे आकारमान लहान असते व त्यापासून मिळणारी शलाकाही रेखीव आकाराची असते. या पद्धतीमध्ये भू-स्थानकापासून दोन स्पंद संदेश पाठविले जातात. हे संदेश क्रमवीक्षण क्रियेच्या दोन महत्वाच्या टप्प्यांच्या क्षणी प्रेषित केले जातात. यामधील कालावधी ठराविक मूल्याचा असतो. विमान जर योग्य दिशेने येत असेल, तर वाहनावरील उपकरणाच्या साहाय्याने मोजलेला कालावधी व वरील कालावधी एकाच मूल्याचे असतात. विमान जर इष्ट दिशेपासून विचलित झाले, तर या दोन कालावधींत फरक पडतो. हा फरक विमानातील सूक्ष्म प्रक्रियकाला (संगणकाच्या संकलित इलेक्ट्रॉनीय मंडल स्वरूपी मध्यवर्ती विभागाला) मिळाला म्हणजे तो गणित करून प्रत्यक्ष दिशा इष्ट दिशेपेक्षा किती अंशाने निराळी आहे हे सरळ उपकरणाच्या तबकडीवर दाखवितो.
प्रचलित पद्धतीप्रमाणे ६०° रूंद व १·५° उन्नत कोनामध्ये स्थानकाकडे येणाऱ्या विमानाकरिता ही पद्धत कार्यान्वित करता येते. सूक्ष्मतरंगावर आधारित अशा नव्या पद्धतीमध्ये या कोनाच्या मर्यादा ± ४०° एवढ्या असतात. या पद्धतीमध्ये सूक्ष्मतरंग शलाका अवकाशाचे या मर्यादेत सारखे क्रमवीक्षण (ठराविक क्रमाने निरीक्षण) करीत असते. या क्रियेमध्ये तिची गती एकदा उजवीकडून डावीकडे अशी असते, तर यानंतर परतीच्या मार्गाकरिता ती डावीकडून उजवीकडे येते. शलाकेची ही हालचाल यांत्रिक रीत्या केली जात नसून याकरिता विशिष्ट आकाशक रचनाव्यूह वापरून ती इलेक्ट्रॉनीय पद्धतीने केली जाते. सूक्ष्मतरंगाची लांबी कमी असल्यामुळे अशा आकाशकाचे आकारमान लहान असते व त्यापासून मिळणारी शलाकाही रेखीव आकाराची असते. या पद्धतीमध्ये भू-स्थानकापासून दोन स्पंद संदेश पाठविले जातात. हे संदेश क्रमवीक्षण क्रियेच्या दोन महत्वाच्या टप्प्यांच्या क्षणी प्रेषित केले जातात. यामधील कालावधी ठराविक मूल्याचा असतो. विमान जर योग्य दिशेने येत असेल, तर वाहनावरील उपकरणाच्या साहाय्याने मोजलेला कालावधी व वरील कालावधी एकाच मूल्याचे असतात. विमान जर इष्ट दिशेपासून विचलित झाले, तर या दोन कालावधींत फरक पडतो. हा फरक विमानातील सूक्ष्म प्रक्रियकाला (संगणकाच्या संकलित इलेक्ट्रॉनीय मंडल स्वरूपी मध्यवर्ती विभागाला) मिळाला म्हणजे तो गणित करून प्रत्यक्ष दिशा इष्ट दिशेपेक्षा किती अंशाने निराळी आहे हे सरळ उपकरणाच्या तबकडीवर दाखवितो.
भारतामध्ये विमानाचे मार्गनिर्देशन करण्याकरिता रेडिओ दिक्सूचक व अ. व्या. प. योजना प्रामुख्याने राबविल्या जातात. आ. १० मध्ये भारतातील काही हवाई मार्गांवरील अशा केद्रांची स्थाने, रेडिओ दिक्सूचक शलाका केंद्रे, विविध केंद्रांचा परिचय, सांकेतिक अक्षरे वगैरे माहिती सांकेतिक खुणांनी दाखविली आहेत.
वाहन स्थाननिश्चिती : याकरिता असलेल्या काही इलेक्ट्रॉनीय पद्धती पुढीलप्रमाणे : (१) अपास्ताकार मार्गनिर्देशन, (२) रेडिओद्वारा अंतरमापन, (३) उपग्रहद्वारा स्थाननिश्चिती, (४) रडार पद्धती. यांपैकी काही महत्त्वाच्या पद्धतींचे वर्णन येथे केले आहे.
अपास्ताकार मार्गनिर्देशन पद्धती : वाहनांचे स्थान काढण्याकरिता या पद्धतीमध्ये दोन किंवा अधिक स्थानकांपासूनच्या त्याच्या अंतरामधील फरक मोजला जातो. या कार्याकरिता दोन ज्ञात स्थानकांपासून रेडिओ संदेश एकाच वेळी प्रेषित केले जातात. हे रेडिओ संदेश स्पंद अथवा विरूपित अखंडित तरंगांच्या स्वरूपात असतात. दोन स्थानकांपासून निघालेल्या संदेशांना वाहनापाशी पोचण्यास लागणाऱ्या कालांतराचे मापन करून त्यांपासून असणाऱ्या अंतरामधील फरक काढला जातो. सर्व रेडिओ संदेश C या प्रकाशवेगाने हवेत प्रगत होत असल्यामुळे मोजावयाचे कालांतराचे मूल्य सूक्ष्म असते. उदा., दोन स्थानकांमध्ये जर तीन किमी. एवढे अंतर असेल, तर वरील कालांतर १० मायक्रोसेकंद एवढे असते. या दोन स्थानकांपासून निघणाऱ्या संदेशांत पडणारे कालांतर परिणामतः कलांतराच्या समतुल्य आहे असे म्हणता येते व तशा स्वरूपातच ते मोजले जाते.
या पद्धतीमध्ये वापरण्यात आलेल्या तत्त्वांचे विशदीकरण आ. ११ च्या साहाय्याने करता येते. अ व आ या स्थानकांपासून एकाच वेळी दोन रेडिओ तरंग स्पंद प्रेषित केले जात आहेत असे समजू. आकृतीत दाखवलेला प्रत्येक आनुक्रमिक वक्र क्ष अंतराचे (म्हणजे अंदाजे ०·३ किमी.) निर्देशन करतो व हे अंतर चालून जाण्यास रेडिओ तरंगांना १ मायक्रोसेकंद एवढा काल लागतो असे समजले आहे. अआ रेषेची कख ही लंबदुभाजक असून त्यावर जर वाहन असेल, तर त्यावरील ग्राहीमध्ये दोन्ही स्थानकांपासून निघणारे रेडिओ संदेश एकाच वेळी पोचतील हे उघड आहे. वाहन अ या स्थानकाच्या क्ष या अंतराने अधिक जवळ असेल, तर वाहनावरील ग्राहीला अ पासूनच संदेश प्रथम मिळेल आणि त्यानंतर २ मायक्रोसेकंदांनी आ येथील संदेश मिळेल. या परिस्थितीकरिता वाहन इई या अपास्ताकार [→ अपास्त] रेषेवर असले पाहिजे. याच न्यायाने वाहन अ स्थानापासून २क्ष या अंतराने जास्त जवळ असेल, तर वाहन ग्राहाला आ पासूनचा संदेश ४ मायक्रोसेकंदांनी उशिरा मिळेल व वाहनाचे स्थान एऐ ही अपास्ताकार रेषा निर्देशित करेल. कालांतराचे मूल्य जर पूर्ण मायक्रोसेकंदांमध्ये येत असेल, तर अशा प्रकारे वाहन कोणत्या रेषेवर आहे हे निश्चित करता येते. अपूर्णांक मायक्रोसेकंद कालांतराकरिता याचप्रमाणे इतर रेषा आकृतीमध्ये काढता येतात. या पद्धतीच्या प्रत्यक्ष वापराकरिता अशा प्रकारच्या अपास्ताकार रेषा छापलेले तक्ते प्रत्येक स्थानक जोडीकरिता तयार केले जातात. वाहन जर या दोन स्थानकांपासून समान अंतरावर असेल तर स्थाननिश्चितीमध्ये संदिग्धता येते. अशा प्रकारे मिळणाऱ्या तत्क्याचा उपयोग दुसऱ्या एका स्थानक जोडीकरिता अशाच प्रकारे मिळालेल्या तत्क्याबरोबर संकलितपणे केला असता वाहनांचे स्थान जास्त अचूकपणे निश्चित करता येते. या कार्याकरिता दोन्ही तक्ते एकमेकांवर अध्यारोपित करतात म्हणजे एकमेकांवर ठेवले जातात. तत्क्यात मिळालेल्या विशिष्ट रेषा जेथे एकमेकींना छेदतात तो बिंदू वाहनाचे तात्कालिक स्थान दाखवितो. या तत्त्वांवर आधारित अशा स्थाननिश्चितीच्या लोरान, डेक्का अशा अनेक पद्धती उपलब्ध आहेत. त्यांचे वर्णन पुढे केले आहे.
लोरान योजना : दीर्घ अंतरापर्यंत मार्गनिर्देशक करू शकणारी अशी लोरान ही योजना आहे. हिच्या साहाय्याने गतिमान वाहनास ज्ञात स्थानकापासूनचे आपले अंतर जाणून घेता येते. लोरान हा शब्द Long Range Navigation या शब्दांतील काही अक्षरे घेऊन बनविला आहे. लोरानमध्ये एकाऐवजी दोन प्रेषण केंद्रे वापरलेली असतात. त्यांचे प्रेषण रेडिओ स्पंदाच्या स्वरूपात असते. प्रत्येक स्पंद अंदाजे ४० मायक्रोसेकंद कालावधीचा असतो तर त्याची पुनरावृत्ती प्रती सेकंदास २५–३० एवढी असते. दोन्ही केंद्रांतून प्रेषण एकाच वेळी होत नाही. पहिल्या केंद्रातून निघालेला स्पंद संदेश दुसऱ्या केंद्रापाशी पोचला की, मगच दुसऱ्या केंद्रापासून प्रेषण सुरू होते.

पहिल्या केंद्राच्या आदेशानुसार दुसरे केंद्र काम करीत असल्यामुळे पहिल्यास प्रधान केंद्र व दुसऱ्यास सेवक केंद्र अशा संज्ञा दिल्या जातात. या दोन केंद्रांमध्ये साधारणपणे ५०० ते ६५० किमी. अंतर ठेवतात. या दोन केंद्रापासून निघणारे रेडिओ संदेश कोणत्याही एका बिंदूपर्यंत येतात तेव्हा त्यांमध्ये कालांतर असते. हे कालांतर ऋण किरण दोलनदर्शकाच्या साहाय्याने अचूकपणे मोजले जाते. दोन केंद्रांपासून मिळणाऱ्या संदेशांतील प्रत्यक्ष कालांतर व त्यांच्या स्पंदांमध्ये असणारे पूर्वनिर्धारित कालांतर या दोन्हीच्या तुलनेने विमानाला आपले या दोन केंद्रांपासूनचे अंतर काढता येते. या दोन केंद्रांपासून विमान जर समान अंतरावर असेल, तर अशा परिस्थितीत विमानाचे प्रत्यक्ष स्थान निश्चित करण्यात अडचण येते. दोन केंद्रांना जोडणारी जर एक रेषा काढली व तिच्या मध्यबिंदूमधून एक लंब टाकला, तर या लंबावरील प्रत्येक बिंदू दोन केंद्रांपासून समान अंतरावर असतो, असे दाखविता येते. या लंबावरील वाहनाचे स्थान निश्चित करण्याकरिता आणखी दोन लोरान केंद्रांपासूनचे संदेश ग्रहण करून या सर्व मापनांचा संकलितपणे उपयोग करणे, हा मार्ग उपयोगात आणला जातो. लोरान प्रेषण केंद्रातून दोन प्रेषणे केली जातात व त्यांमध्ये एक निश्चित कालांतर असते याचा उल्लेख वर आलाच आहे. महत्त्वाची गोष्ट अशी की, एक या जोड केंद्राकरिता असणारे कालांतर दुसऱ्या कोणत्याही जोड केंद्राकरिता वापरले जात नाही. त्यामुळे हे कालांतर हाच त्या जोड केंद्राचा परवलीचा संकेत होतो. अशी लोरान केंद्रे अटलांटिक व पॅसिफिक महासागराच्या किनाऱ्यावर ठिकठिकाणी स्थापित करण्यात आली आहेत. लोरानचे प्रेषण नीच कंप्रता रेडिओ स्पंदाच्या स्वरूपात होत असल्यामुळे हे संदेशवाहक प्रारण पृथ्वीच्या वक्रतेशी अनुसरून जाऊ शकते. त्यामुळे वाहनामधील ग्राहीमध्ये हे प्रारण दूर अंतरापर्यंत (३,००० किमी.) पकडता येते. त्याचे संदेश विमानाकरिताच नव्हे तर समुद्रावर प्रवास करणाऱ्या जहाजांना सुद्धा मिळू शकतात. अशा तऱ्हेने या पद्धतीचा उपयोग विमान व जहाज यांच्या मार्गनिर्देशनासाठी करता येतो. आकाशातील ताऱ्यांच्याद्वारे स्थान निश्चिती करण्यामध्ये जेवढी अचूकता मिळते तेवढीच अचूकता या पद्धतीमध्ये मिळते. लोरान-सी नावाची अधिक प्रगत मार्गनिर्देशन योजना १९७४ सालापासून वापरात आली आहे. या पद्धतीची अचुकता अंदाजे १८० मीटर असते.
डेक्का योजना : डेक्का प्रणालीमध्ये स्पंदाऐवजी अखंडित कार्यकारी नीच कंप्रता रेडिओ तरंगांचा उपयोग केला जातो. यामध्ये एक प्रधान केंद्र व तीन सेवक केंद्रे असतात. या सर्व केंद्रांच्या प्रेषण कंप्रता एकसमान नसून त्या एकच मूलभूत कंप्रता मूल्यापासून मिळविलेल्या असतात (उदा., मूलभूत कंप्रता जर f असेल, तर केंद्र कंप्रता ५f, ६f, ८f, ९f, अशा असू शकतात). सेवक केंद्रे त्रिकोणाकृतीत बसवलेली असतात, तर या त्रिकोणाच्या मध्यभागी प्रधान केंद्र असते. अशा केंद्र वा स्थानक समूहाला साखळी असे म्हटले जाते. वाहनामध्ये असणाऱ्या ग्राहीच्या द्वारे या केद्रांपासून येणाऱ्या संदेशांचे ग्रहण केले जाऊन त्यातील कलांतर मोजले जाते आणि अशा तऱ्हेने वाहनाला आपले स्थान शोधून काढता येते. या पद्धतीकरिता कार्यकारी अंतर काही शेकडो किलोमीटर असते, तर अंतरमापनातील अचूकता ३० मी. एवढी असते. मोजलेल्या कलांतर मूल्यावरून वाहनाचे स्थान आलेख पद्धतीचा उपयोग करून काढता येते. या कार्याकरिता अंकीय संगणक [→ संगणक] वापरला असता वाहनाचे तात्कालिक अक्षांश व रेखांश सरळ मिळविता येतात.
कॉनसोल: जर्मनीमध्ये विकसित केलेल्या या पद्धतीमध्ये अपास्ताकार मार्गनिर्देशन तत्त्वाचाच उपयोग केलेला असतो. यामध्ये एकाच रेषेत प्रस्थापित केलेले असे तीन प्रेषक आकाशक असतात. यांमध्ये मधला प्रधान केंद्र व बाजूचे दोन सेवक केंद्रे म्हणून कार्य करतात. प्रेषित रेडिओ संदेश कंप्रता मध्यम प्रतीची असते. यामधील सेवक केंद्रांच्या प्रेषण संदेश कलेत आकस्मिक पण ठराविक कालांतराने बदल केले जातात. परिणामी वाहन जर प्रणालीकडे एका ठराविक दिशेत येत असेल, तरच वाहनाच्या ग्राहीमध्ये एक सुरेल ध्वनीसंकेत मिळतो. या कार्याकरिता साधी रेडिओ ग्राही वापरता येते, हा या पद्धतीचा एक चांगला गुण आहे.
रेडिओद्वारे उच्चतापमान : विमानातील रेडिओ उच्चतामापक रेडिओ तरंग अखंडितपणे प्रेषित करीत असतो. प्रेषित केलेला मूळ रेडिओ संदेश हा जमिनीपर्यंत पोचून त्याचे तेथे परावर्तन होऊन तो परत उच्चतामापकाशी परत येण्यास लागणारा विलंब अथवा मूळ संदेश व परावर्तित संदेश यामध्ये मिळणारे कलांतर यांवरून विमानाची जमिनीपासून उदग्र दिशेतील उंची मोजता येते. विमान जेव्हा जमिनीवर उतरत असते तेव्हा या उपकरणाचा विशेष उपयोग होतो. विमानामध्ये एक स्पंद प्रेषक ठेवून त्याच्यापासून पाठविलेल्या स्पंदाला जमिनीपर्यंत पोचून परावर्तित होऊन परत विमानामधील ग्राहीपाशी पोचण्यास लागणाऱ्या कालविलंबाचे मापन करून विमानाची जमिनीपासूनची उंची काढता येते. या प्रकारच्या उपकरणावर उंची कशी मिळते हे आ. १२ वरून स्पष्ट होईल.
 रेडिओद्वारे अंतरमापन : कोणत्याही एका स्थानकापासूनचे विमानाचे अंतर मोजण्याकरिता अंतरमापन संच (अं. मा. सं.) वापरला जातो.याकरिता विमानातील रेडिओ प्रेषक रेडिओ संदेश विद्युत् स्पंद अथवा अखंडित विद्युत्तरंग याच्या स्वरूपात प्रेषित करतो. जमिनीवरील अं. मा. सं. शलाका स्थानक या संदेशाचे ग्रहण करून त्यास परत प्रेषित करतो. विद्युत् स्पंदाला हा एकूण प्रवास करण्यास लागणारा वेळ अचूक इलेक्ट्रॉनीय प्रयुक्तीच्या साहाय्याने मोजला असता विमान व स्थानक यांमधील अंतर काढता येते. विमानकरिता या संचाचा सर्रास उपयोग केला जातो. अंतरमापन संचाचा अतिउच्च कंप्रता व्यापक परासच्या शलाकेबरोबर उपयोग केल्यास विमानाचे त्यापासूनचे ३०० किमी. पर्यंतचे अंतर व चुंबकीय रोख-कोन अचूक मिळतात आणि विशिष्ट सीमादर्शकाच्या बरोबर त्याचा उपयोग केल्यास ८० किमी. पर्यंतचे अंतर अचूक मिळते.
रेडिओद्वारे अंतरमापन : कोणत्याही एका स्थानकापासूनचे विमानाचे अंतर मोजण्याकरिता अंतरमापन संच (अं. मा. सं.) वापरला जातो.याकरिता विमानातील रेडिओ प्रेषक रेडिओ संदेश विद्युत् स्पंद अथवा अखंडित विद्युत्तरंग याच्या स्वरूपात प्रेषित करतो. जमिनीवरील अं. मा. सं. शलाका स्थानक या संदेशाचे ग्रहण करून त्यास परत प्रेषित करतो. विद्युत् स्पंदाला हा एकूण प्रवास करण्यास लागणारा वेळ अचूक इलेक्ट्रॉनीय प्रयुक्तीच्या साहाय्याने मोजला असता विमान व स्थानक यांमधील अंतर काढता येते. विमानकरिता या संचाचा सर्रास उपयोग केला जातो. अंतरमापन संचाचा अतिउच्च कंप्रता व्यापक परासच्या शलाकेबरोबर उपयोग केल्यास विमानाचे त्यापासूनचे ३०० किमी. पर्यंतचे अंतर व चुंबकीय रोख-कोन अचूक मिळतात आणि विशिष्ट सीमादर्शकाच्या बरोबर त्याचा उपयोग केल्यास ८० किमी. पर्यंतचे अंतर अचूक मिळते.
मार्गनिर्देशक उपग्रह : अवकाशात प्रस्थापित केलेल्या उपग्रहाचा परिभ्रमण वेग पृथ्वीपासूनच्या त्याच्या अंतरावर अवलंबून असतो. ३५,६८० किमी. अंतरावर प्रस्थापित केलेला उपग्रह पृथ्वीच्याच परिभ्रमण गतीने पृथ्वीभोवती फिरत असल्यामुळे म्हणजेच समकालिक कक्षेत फिरत असल्यामुळे पृथ्वीवरील निरीक्षकाच्या सापेक्ष तो स्थिर आहे, असा अनुभव मिळतो. पृथ्वीच्या पृष्ठभागावरील वाहनापासून प्रेषित केलेल्या रेडिओ संदेशाचे ग्रहण करून त्याचे परत जमिनीकडे प्रेषण करता येते. उपग्रह अभिचालित्राप्रमाणे (एका संदेशवाहन प्रणालीकडून येणारा संदेश ग्रहण करून तो दुसऱ्या प्रणालीला पोहोचविण्याच्या यंत्रणेप्रमाणे) काम करतो व अं. मा. सं. तत्त्वाचा उपयोग करून वाहनाच्या स्थानाविषयी अंदाज करता येतो.
पृथ्वीच्या सापेक्ष स्थिर असणाऱ्या उपग्रहावरून काल निर्देशक व स्थिती निर्देशक (उपग्रह स्थान इ.) प्रदत्त (माहिती) सतत प्रेषित केला जात असतो. पृथ्वीवरील निरीक्षण केंद्र हा प्रदत्त पुरवीत असते. डॉप्लर पद्धतीचा उपयोग करून यावरून वाहनाचा वेग व स्थान गणित करून काढता येते. या मापनाची अचूकता सु. ०·९ किमी. या परिमाणाची असते.
वरील कार्याकरिता गतिशील उपग्रहांचा पण उपयोग करता येतो. अशा प्रकारचा उपग्रह सामान्यपणे ८० मिनिटांत पृथ्वीभोवती एक फेरी पूर्ण करतो. उपग्रहाचा गतिमार्ग पृथ्वीच्या अक्षाशी कोन करील अशा तऱ्हेने त्याचे क्षेपण केल्यास उपग्रहांच्या गतिकक्षेखाली अनेक अक्षांश क्रमाने येतात. उपग्रहापासून एक सतत स्थिर कंप्रतेचा रेडिओ संदेश प्रेषित केला जात असतो. वाहनाच्या सापेक्ष उपग्रहाला गती असल्यामुळे वाहनावर असलेल्या रेडिओ ग्राहीमध्ये या संदेशाचे ग्रहण करून त्याची कंप्रता मोजली असता तीमध्ये बदल झालेला आढळतो. कंप्रतेमधील बदलावरून दोहोमधील सापेक्ष वेग व बदलाच्या त्वरेवरून वाहनाची वेगदिशा व स्थान यांविषयी अंदाज करता येतो. वाहनाच्या माथ्यावरून उपग्रह जेव्हा जातो त्या क्षणीचे वाहनाचे स्थान वरील प्रदत्तावरून गणनाद्वारे निश्चित करता येते. साधे अंकगणित वापरून हे गणन करणे शक्य असले, तरी त्वरित निष्कर्षासाठी संगणकाचा उपयोग केला जातो.
पृथ्वीभोवताली भ्रमणकक्षेत फिरत असणाऱ्या उपग्रहावरून पृथ्वीवरील कोणत्याही स्थानकाचे स्थान (म्हणजेच रेखांश व अक्षांश) सुद्धा निश्चित करता येते. उपग्रह स्थानकाकडे जसा येत जातो तेव्हा त्याच्यापासून प्रेषित करण्यात येणाऱ्या रेडिओ कंप्रतेत डॉप्लर परिणामामुळे सारखी वाढ होताना आढळते. याउलट उपग्रह जसा स्थानकापासून दूर जाऊ लागतो तशी त्यापासून मिळणाऱ्या कंप्रतेत घट होत जाते. डॉप्लर पद्धतीचा उपयोग करून उपग्रहाचा वेग काढला व इतर प्रकारे त्याच्या भ्रमण कक्षेविषयी माहिती उपलब्ध झाली, तर संगणकाच्या साहाय्याने कोणत्याही स्थानकाचे स्थान निश्चित करता येते. याच तत्त्वाचा उपयोग करून १९८९ पासून आधुनिक NAVSTAR योजना अमलात यावी अशी अपेक्षा आहे. यामध्ये एकंदर २४ उपग्रह असतील. हे उपग्रह प्रत्येक प्रतलात ८ उपग्रहांचा गट याप्रमाणे तीन प्रतलांत अवकाशातील भ्रमण कक्षांत फिरत राहतील. सध्याच्या मार्गनिर्देशन पद्धतीची अचुकता ± ५० मी. एवढी आहे, तर या नव्या पद्धतीमध्ये ± १५ मी. अचुकतेने स्थान निश्चित केले जाईल. [→ उपग्रह कृत्रिम उपग्रह संदेशवहन].
रडार : कोणत्याही गतिमान वाहनाची गतिदिशा, अंतर व वेग यांचे मापन रडारच्या साहाय्याने करता येते. दुसऱ्या महायुद्धाच्या थोडा काळ आधी रडार तंत्राचा उपयोग होऊ लागला. जहाज किंवा विमान यासारख्या वाहनाचा शोध, त्यांच्या अंतराचा अंदाज मिळविणे किंवा त्यांचे मार्गनिर्देशन करणे या क्रियांकरिता रडारचा उपयोग केला जातो. या कार्याकरिता काही सेंमी. तरंगलांबीचे विद्युत्चुंबकीय सूक्ष्मतरंग वापरले जातात. याच्या साहाय्याने काही मीटर आकारमान असलेल्या वस्तूचा शोध करता येतो. रडार प्रणालीकरिता वापरात असलेला आकाशक एकसमान गतीने सर्व दिशांत सतत परिभ्रमण करीत असतो. एकामागून एक असे विद्युत् स्पंद हा आकाशक ठराविक कालखंडाने प्रेषित करीत असतो. स्पंदाच्या मार्गात जेव्हा जहाज किंवा विमान यासारख्या वस्तू येतात तेव्हा स्पंदाचे परावर्तन होते. हा प्रतिध्वनीसारखा संदेश रडार आकाशकाकडे परत येतो. तेव्हा रडार संचाच्या ग्राहीद्वारे त्याचे ग्रहण केले जाऊन त्याचे ऋण किरण दोलनदर्शकावर संदर्शन केले जाते. प्रदर्शन क्रियेच्या एका पद्धतीमध्ये या उपकरणाच्या स्फुरक (विद्युत्चुंबकीय उर्जेचा किंवा विद्युत्कणांचा भडिमार चालू असताना प्रकाशणाऱ्या) पडद्याच्या केंद्रबिंदूपासून अरीय दिशेत बाहेरच्या बाजूस धावणाऱ्या अशा इलेक्ट्रॉनीय रेषा मिळतात. ज्या क्षणी स्पंद प्रेषित केला जाते, त्या क्षणी रेषा केंद्रबिंदूपासून आपला प्रवास सुरू करते. परावर्तित संदेश मिळताक्षणीच या रेषेवर एक तेजःपुंज प्रकाशबिंदू दिसतो. या बिंदूचे केंद्रापासूनचे अंतर, स्पंदाला वस्तूपर्यंत जाऊन परत येण्याकरिता जो कालखंड लागतो. त्यास समानुपाती (सम प्रमाणात) असते. ज्या दिशेत स्पंद पाठविला गेलेला असतो त्याच दिशेत वस्तू असते. आकाशकाच्या दिक्विन्यासावर स्पंद प्रेषित केली जाण्याची दिशा अवलंबून असल्यामुळे ही दिशा निश्चित करणे सोपे असते. आकाशक जसा फिरविला जातो तशी ऋण किरण दोलनदर्शकाच्या पडद्यावर अस्पष्ट अशी एक अरीय रेषा परिभ्रमण करताना दिसते. ज्याप्रमाणे नकाशावर एखाद्या परिसरातील सर्व लहान-मोठ्या वस्तूंचे स्थाननिर्देशन केलेले असते त्याप्रमाणे आकाशकाचे परिभ्रमण केले असता त्याच्या आसमंतातील वस्तूंचा ठावठिकाणा दाखविणारा नकाशा तयार होतो. ऋण किरण दोलनदर्शकाच्या अनुस्फुरक पडद्यावर दीर्घस्थायी प्रस्फुरक द्रव्याचा (शोषिलेल्या प्राथमिक उर्जेपैकी काही भाग प्रकाशमान प्रारणाच्या रूपात उत्सर्जित करणाऱ्या द्रव्याचा) उपयोग केलेला असतो. त्यामुळे यावर मिळालेला नकाशा पुरेशा वेळेपर्यंत दृश्यमान राहतो व त्याचे निरीक्षण करता येते.
परावर्तित संदेशाची तीव्रता अथवा बल परावर्तन करणाऱ्या पृष्ठभागाच्या गुणधर्मावर अवलंबून असते. उदा., समुद्राच्या पृष्ठभागापासून परावर्तित होणाऱ्या संदेशाची तीव्रता कमी असते. समुद्र जर खवळलेला असेल, तर मात्र परावर्तनाने प्रमाण वाढते. जमिनीपासून होणाऱ्या परावर्तनात प्रकीर्णनाचा (इतस्ततः विखुरण्याचा) बराच भाग असतो. टेकड्या, जहाजे, विमाने, इमारती यांपासून मात्र प्रबल परावर्तन मिळते. रडारकरिता वापरण्यात येणाऱ्या विद्युत्चुंबकीय तरंगाची लांबी प्रकाशाच्या तरंगलांबीपेक्षा बरीच जास्त असल्यामुळे रडारच्या साहाय्याने मिळालेले छायाचित्र सुस्पष्ट नसते. त्यापासून निष्कर्ष काढण्याकरिता अनुभव लागतो कारण मिळालेल्या आकृतिबंधावर योग्य भाष्य करणे अथवा त्यांचे योग्य अर्थबोधन करणे आवश्यक असते.
वाहनांमध्ये परस्पर टकरा होणार नाहीत याची काळजी रडारच्या साहाय्याने घेता येते. सभोवताली परिसरात धुके असेल किंवा प्रकाश अपुरा असेल, तर अशा वेळी वाहनांची गतिदिशा निश्चित करणे अवघड होते. अशा परिस्थितीत रडारची मदत घेणे अत्यंत आवश्यक ठरते. विमानाकरिता हवाई वाहतूक नियंत्रण म्हणून रडारचा उपयोग करण्यात येतो. हे कार्य जास्त चांगल्या रीतीने करण्याकरिता दोन रडार यंत्रणांचा एकाच वेळी उपयोग केला जातो. यांपैकी एक रडार विमानाच्या क्षैतिज दिशेत निरीक्षण करीत असते, तर दुसरे यंत्र वाहनाच्या (उदा., विमान) उदग्र दिशेत होणाऱ्या हालचालींवर लक्ष केंद्रित करीत असते. उच्च कंप्रता रडारचा उपयोग करून दूर अंतरावर असणाऱ्या वाहनाचे निरीक्षण करता येते [→ रडार].
विशेष मार्गनिर्देशन योजना: वाहनाला मार्गनिर्देशन करून एका ठराविक ठिकाणापर्यंत पोहोचविणे या क्रियेमध्ये तीन विभाग आहेत : (१) पहिल्या विभागात मार्गनिर्देशन केले जाते म्हणजे उपकरणाच्या द्वारे गतिमान वाहनाचे निरीक्षण करून त्याचे स्थान व वेग यांचे मापन केले जाते. (२) मार्गदर्शन या दुसऱ्या विभागात वाहनाकरिता योग्य अशा गतिमार्गाची निश्चिती केली जाते. (३) नियंत्रण या तिसऱ्या विभागामध्ये प्रत्यक्ष मार्ग व नियोजित मार्ग यांमध्ये सुसूत्रता आणण्याकरिता त्यास वेळोवेळी योग्य समादेश देऊन त्याच्या गतीत बदल घडवून आणले जातात. क्षेपणास्त्र, अवकाशयान यांसारख्या स्वयंचलित वाहनांच्या बाबतीत मार्गनिर्देशनामध्ये वरील तिन्ही विभागांचा विचार करावा लागतो कारण या तीनही क्रिया एकमेकींशी निगडित असतात.
नियंत्रण प्रणालीमध्ये मुख्यतः तीन प्रकार वापरात आढळतात.
(१) शलाकेद्वारे नियंत्रण पद्धती: या पद्धतीमध्ये (उदा., कमी पल्ल्याचे क्षेपणास्त्र) जमीन, जहाज अथवा समादेशक विमान यापासून एक विद्युत्चुंबकीय प्रारण शलाका प्रेषित केली जाते. क्षेपणास्त्र शलाकेचे निर्धारित केलेल्या क्षेत्रात सतत जात राहील या करिता स्वयंचलित योजना वापरलेली असते [→ दूरवर्ती नियंत्रण प्रणाली]. वाहनाने लक्ष्याचा शोध घेऊन त्यापाशी पोहोचावे याकरिता अतिरिक्त लक्ष्यानुगामी प्रयुक्ती किंवा योजना पण वापरावी लागते. लक्ष्यानुगामी पद्धतीकरिता परत तीन पर्याय उपलब्ध आहे. यांपैकी निष्क्रिय योजनेमध्ये लक्ष्यापासून प्रेषित होणाऱ्या प्रारणाच्या साहाय्याने अस्त्र त्याचा शोध घेते. उदा., साइड वाइंडर क्षेपणास्त्र जेट विमानापासून बाहेर टाकल्या जाणाऱ्या अवरक्त (दृश्य वर्णपटातील तांबड्या रंगापलीकडील अदृश्य) प्रारणाचा या कार्याकरिता उपयोग करीत असते. सक्रिय लक्ष्यानुगामी योजनेमध्ये वाहनापासूनच मार्गदर्शनाकरिता आवश्यक अशा प्रारणाचे प्रेषण होत असते. उदा., चंद्रावर प्रत्यक्ष उतरणाऱ्या चांद्रयानावर रडार योजना बसविली होती. यामध्ये वाहनाच्या रडारपासून बाहेर पडणारे प्रारण नियंत्रण अपोलो अवकाशयानापासून परावर्तित प्रारणाचा मार्गदर्शनाकरिता उपयोग करून चांद्रयान मूळ अपोलो यानाकडे परत जाऊ शकले. अर्ध-सक्रिय या तिसऱ्या पद्धतीमध्ये बाहेरून पुरविलेल्या रेडिओ संदेशाद्वारे वाहनाचे मार्गदर्शन होते. उदा., विमानवेधी क्षेपणास्त्रामध्ये रडार स्थानकापासून प्रेषित केलेल्या प्रारणाचे जेव्हा लक्ष्यापासून (शत्रू विमानापासून) परावर्तन होते. तेव्हा या परावर्तित प्रारणाच्या साहाय्याने क्षेपणास्त्राचे मार्गदर्शन केले जाते. [→ दूरवर्ती नियंत्रण प्रणाली].
(२) रेडिओद्वारे मार्गदर्शन : या पद्धतीमध्ये वाहनाचे (उदा., आकाशातील विमान) सतत मार्गनिरीक्षण जमिनीवर प्रस्थापित केलेल्या रडार योजनेच्याद्वारे केले जात असते. या क्रियेमध्ये जो प्रदत्त मिळतो त्यावरून वाहनाचे स्थान व त्याची गती या दोहोंविषयी माहिती मिळते. या माहितीवर आधारित व योग्य असे आज्ञासंदेश अथवा समादेश रेडिओद्वारे वाहनाला पोहोचविले जातात. अशा रीतीने आवश्यक तेव्हा त्याच्या गतीत योग्य ते बदल घडवून आणून त्याचे सतत मार्गदर्शन केले जाते.
(३) निरूढी मार्गनिर्देशन: दुसऱ्या महायुद्धाच्या काळापासून पाणबुड्या, विमाने इत्यादींच्या चालनात निरूढी मार्गनिर्देशनामुळे मोठी क्रांती घडून आलेली आहे. न्युटन यांच्या गती व निरूढी (जडत्व) यांच्या संबंधीच्या नियमांवर हे मार्गनिर्देशन आधारलेले असल्यामुळे त्याला हे नाव देण्यात आलेले आहे.
निरूढी मार्गनिर्देशक एका संदर्भ-व्यूहाच्या सापेक्ष वाहनाचा दिक्-कोन, स्थान, वेग, प्रवेग इ. राशींचे मापन करू शकतो. याकरिता त्याला काल, गुरूत्वीय क्षेत्र, वाहनाचे प्राथमिक स्थान, प्राथमिक वेग व प्राथमिक दिक्-कोन यांविषयीची माहिती प्रथम पुरवावी लागते. यापद्धतीत प्रवेगमापकाच्या साहाय्याने वाहनाचा प्रवेग सतत मोजला जातो. प्रवेग-काल चलनावरून समाकलन क्रिया [→ अवकलन व समाकलन] करून वाहनाचा वर्तमान वेग मिळविला जातो. वेग-काल चलनावरून परत दुसऱ्या समाकलन क्रियेचा उपयोग करून वाहनाचे वर्तमान स्थान मिळविता येते. समाकलन व गणन करण्याकरिता संगणक वापरला जातो. या प्रकारची मार्गनिर्देशन पद्धत पाणबुडी, जहाजे, विमाने, अवकाशयान, क्षेपणास्त्रे यांकरिता वापरली जाते. या पद्धतीद्वारे वाहनाचे तात्कालिक स्थान, समुद्रसपाटीपासूनची उंची (अथवा पाणबुडीची खोली) यांचे ज्ञान होऊ शकते आणि त्याचा उपयोग करून वाहन निश्चिती स्थानी नेणे शक्य होते. विमानाच्या स्वयंचालकास ही माहिती पुरविल्यास विमानाचे योग्य चालन होऊ शकते.
निरूढी मार्गनिर्देशक प्रवेशमापकाद्वारे वाहनाचा प्रवेग मोजीत असतो. एक प्राथमिक स्वरूपाचा प्रवेशमापक आ. १३ मध्ये दाखविला आहे.
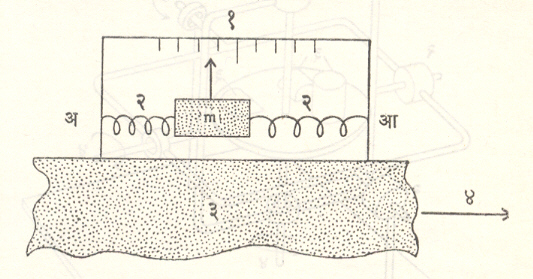
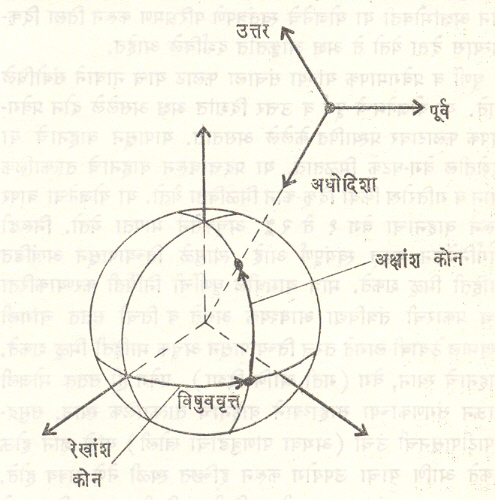
वाहनाला प्रवेग दिला असता m या द्रव्यमानाला तेवढाच प्रवेग मिळतो. यामुळे जमिनीला समांतर अशी त्यावर प्रेरणा निर्माण होऊन या द्रव्यमानाचे आ दिशेत विस्थापन होते. रॉबर्ट हुक यांच्या नियमाप्रमाणे हे विस्थापन प्रेरणेच्या रेषीय (एकघाती) प्रमाणात होत असल्यामुळे त्यावरून प्रवेगाचे मूल्य काढता येते. जर वाहनाचा मार्ग समतल (क्षैतिज) दिशेत नसेल, तर मोजलेल्या प्रवेगात स्थानिक गुरूत्वामुळे निर्माण होणाऱ्या प्रवेगाचा अंश असतो. याकरिता गुरूत्वाचे त्या स्थानी असलेले मूल्य माहीत असावे लागते म्हणजे त्यापासून त्याच्या परिणामाचे गणन करून वाहनाचा खरा प्रवेग मिळविता येतो. या परिस्थितीत प्रवेगमापकाचा जमिनीच्या सापेक्ष दिक्विन्यास निश्चित करण्याकरिता घूर्णीचा उपयोग केला जातो. या कार्याकरिता एक संदर्भ-व्यूह वापरणे आवश्यक असते. स्थानिक पूर्व, उत्तर व अधोदिशा यांच्या साहाय्याने हा व्यूह निश्चित करण्याची एक रीत आहे (पहा आ.१४). जेव्हा परिपीडन परिबल (फिरवणारी स्पर्शक प्रेरणा व परिभ्रमण अक्षापासूनचे तिचे अंतर यांच्या गुणाकाराने दर्शविली जाणारी व पीळ उत्पन्न करणारी भौतिक राशी) कार्य करीत नसते तेव्हा आदर्श घूर्णीची अवकाशातील परिभ्रमण दिशा स्थिर राहते. घूर्णीवर परिपीडन परिबल लावले असता तीमध्ये अंश शोधित व नियमित अशी परांचन गती [→ घूर्णी] मिळते. परांचन गतीचे मूल्य पृथ्वीच्या सापेक्ष असलेला वाहनाचा दिक्कोन, स्थान व त्याच्या वेगावर अवलंबून असते. त्यामुळे घूर्णीच्या वाचनावरून संगणकाच्या साहाय्याने परांचन गतीचे गणन करता येते. प्रत्यक्ष मापनाकरिता तीन घूर्णी आ. १५ (अ) व (आ) मध्ये दाखविल्याप्रमाणे एका फलाटावर प्रस्थापित केल्या जातात. सुरूवातीला फलाटावरील संदर्भ-व्यूह फिरवून एका ठराविक दिशेत प्रस्थापित केला जातो आणि नंतर सेवा-यंत्रणेद्वारे वाहनाची गती या निर्धारित दिशेत नियंत्रित करण्याची व्यवस्था केलेली असते. आकृतीमध्ये दर्शविलेली चलित्रे या सेवा-यंत्रणेचे भाग असतात. फलाटावरील तीन घूर्णी व नियंत्रण करणारी तीन चलित्रे यांच्या साहाय्याने ज्या तीन अक्षांभोवती या योजनेचे स्वतंत्रपणे परिभ्रमण करून तिला दिक्विन्यास देता येतो ते अक्ष आकृतीत दर्शविले आहेत.
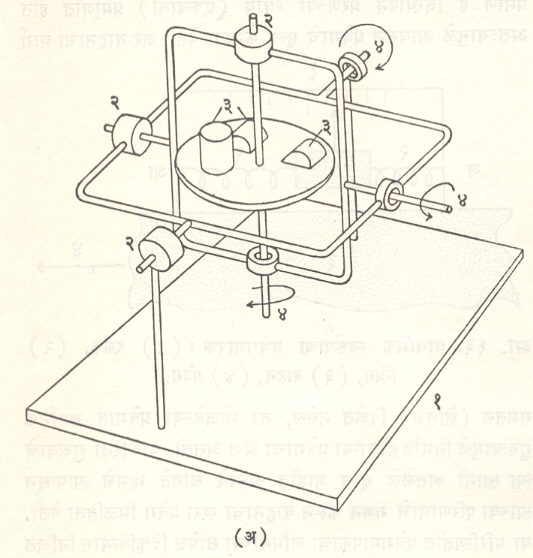 घूर्णी व प्रवेगमापक यांच्या संचाला फलाट याच नावाने संबोधिले जाते. या योजनेमध्ये पूर्व व उत्तर दिशांत अक्ष असलेले दोन प्रवेगमापक फलाटावर प्रस्थापित केलेले असतात. यापासून वाहनाचे या दिशेतील वेग-घटक मिळतात. या प्रदत्तावरून वाहनाचे तात्कालिक स्थान व गतिरोख किंवा दिक्कोन मिळविता येतो. या योजनेचा वापर करून वाहनाचा वेग १ ते २% अचूकतेने मापता येतो. निरूढी मार्गनिर्देशन पद्धत स्वयंपूर्ण आहे त्यामुळे तिच्यापासून अखंडित माहिती मिळू शकते. मात्र यामधील घूर्णीची निर्मिती करण्याकरिता उच्च प्रकारची तंत्रविद्या आवश्यक असते व तिची सतत चांगली देखभाल ठेवावी लागते तरच तिच्यापासून अचूक माहिती मिळू शकते. वाहनाचे स्थान, वेग (गती आणि दिशा), प्रवेग ही सतत मोजली जाऊन संगणकाच्या साहाय्याने वाहनाचे तात्कालिक स्थान, समुद्रसपाटीपासूनची उंची (अथवा पाणबुडीची खोली) यांचे ज्ञान होऊ शकते आणि याचा उपयोग करून इच्छित स्थळी नेणे शक्य होते. विमानाच्या स्वयंचालकात ही माहिती पुरविली जाऊन विमानाचे योग्य चालन होऊ शकते.
घूर्णी व प्रवेगमापक यांच्या संचाला फलाट याच नावाने संबोधिले जाते. या योजनेमध्ये पूर्व व उत्तर दिशांत अक्ष असलेले दोन प्रवेगमापक फलाटावर प्रस्थापित केलेले असतात. यापासून वाहनाचे या दिशेतील वेग-घटक मिळतात. या प्रदत्तावरून वाहनाचे तात्कालिक स्थान व गतिरोख किंवा दिक्कोन मिळविता येतो. या योजनेचा वापर करून वाहनाचा वेग १ ते २% अचूकतेने मापता येतो. निरूढी मार्गनिर्देशन पद्धत स्वयंपूर्ण आहे त्यामुळे तिच्यापासून अखंडित माहिती मिळू शकते. मात्र यामधील घूर्णीची निर्मिती करण्याकरिता उच्च प्रकारची तंत्रविद्या आवश्यक असते व तिची सतत चांगली देखभाल ठेवावी लागते तरच तिच्यापासून अचूक माहिती मिळू शकते. वाहनाचे स्थान, वेग (गती आणि दिशा), प्रवेग ही सतत मोजली जाऊन संगणकाच्या साहाय्याने वाहनाचे तात्कालिक स्थान, समुद्रसपाटीपासूनची उंची (अथवा पाणबुडीची खोली) यांचे ज्ञान होऊ शकते आणि याचा उपयोग करून इच्छित स्थळी नेणे शक्य होते. विमानाच्या स्वयंचालकात ही माहिती पुरविली जाऊन विमानाचे योग्य चालन होऊ शकते.
निरूढी मार्गनिर्देशक योजना विमानापेक्षा जलवाहनाकरिता जास्त अचूक कार्य देतात. अशा योजनेच्या साहाय्याने पाणबुडीचे स्वयंचलित मार्गनिर्देशन यशस्वी रीतीने करण्यात आले आहे. आंतरखंडीय क्षेपणास्त्रांच्या मार्गनिर्देशनाकरिता या पद्धतीचा उपयोग करतात. अस्त्राचा रॉकेट भाग हा प्रवासाच्या प्रारंभिक काळापुरताच प्रज्वलित असतो व या कालखंडाकरिताच हे मार्गनिर्देशन केले जाते. या कालखंडाच्या शेवटी अस्त्र इच्छित मार्गाने जात आहे किंवा नाही हे कळून येते. जेव्हा रॉकेटाचे कार्य संपते तेव्हा अस्त्रावरचे नियंत्रण संपते. अवकाशयानाच्या बाबतीतही अशीच परिस्थिती असते. यानाला प्रवेग देणारी रॉकेटे जेव्हा कार्यान्वित नसतात तेव्हा यान भाररहित अवस्थेत असते. त्यामुळे निरूढी मार्गनिर्देशनाद्वारे त्याच्या स्थानाविषयी माहिती या अवस्थेत मिळविता येत नाही. यानाचे क्षेपण होते तेव्हा यानाची रॉकेटे कार्य करीत असतात आणि या अवस्थेमध्ये निरूढी मार्गनिर्देशन योजनेद्वारे त्याचा दिक्विन्यास योग्य दिशेने प्रस्थापित करता येतो. यानाचा दिक्विन्यास निश्चित करण्याकरिता आकाशातील ताऱ्यांचा उपयोग करतात.
दुसऱ्या महायुद्धाच्या अखेरीस जर्मनांनी उपयोगात आणलेले व्ही-२ क्षेपणास्त्र वरील प्रकारचे होते. फक्त त्याचा गतिमार्ग क्षेपणास्त्र सोडण्यापूर्वी निश्चित केला जात असे.
लेसर घूर्णी : लेसर किरण शलाकेच्या साहाय्याने कार्य करणारी नवीन प्रकारची घूर्णी तयार करण्यात आली असून तिचा उपयोग जेट विमानांच्या मार्गनिर्देशनासाठी नजीकच्या भविष्यकाळात सर्रास केला जाऊ लागेल. यांत्रिक घूर्णीच्या तुलनेत लेसर घूर्णीचे अनेक फायदे आहेत. यांत्रिक घूर्णीला आवर्ती वेग येण्यास सुरूवातीला थोडा कालावधी लागतो. लेसर घूर्णीला असा कालावधी लागत नाही. त्याचप्रमाणे लेसर घूर्णीमध्ये फिरणारे यांत्रिक भाग नसल्यामुळे झीज होण्याचा प्रश्न उत्पन्न होत नाही. या वैशिष्ट्यांमुळे लेसर घूर्णीची विश्वासार्हता अधिक व किंमतही कमी असते.
टक्कर प्रतिबंधक योजना : लहान विमानाकरिता टक्कर टाळण्याकरिता एक सोईस्कर लेसर आधारित योजना सुचविण्यात आली आहे. प्रत्येक विमानात एक मिलिवॉट कार्यशक्तीची लेसर शलाका निर्माण करणारे उपकरण व त्याचे अभिज्ञान करून घेण्याकरिता एक अभिज्ञातक वापरला जाईल. एका विमानापासून लेसर शलाका फेकली असता ती मूळच्याच संकुचित आकारात २ किमी. अंतरापर्यंत राहू शकते. या गुणधर्माचा या पद्धतीत उपयोग केलेला असतो. दुसऱ्या विमानापर्यंत शलाका जेव्हा पोचते तेव्हा ती तेथील अभिज्ञातकावरून किती त्वरेने सरकते यावरून पहिल्या विमानाचा वेग व दिक्कोन यांविषयी माहिती मिळू शकते. अशा प्रकारे १५ सेकंदांची आगाऊ धोका सूचना मिळत असल्यामुळे वैमानिकाला योग्य कारवाई करून टक्कर टाळता येईल.
अवकाशयानाचे मार्गनिर्देशन व मार्गदर्शन : अवकाशात मार्गक्रमण करणाऱ्या वाहनात दोन प्रकार असतात : चांद्रयानाप्रमाणे एक मानवासहित तर दुसरे क्षेपणास्त्राप्रमाणे मानवरहित . या दोन्हीही प्रकारांत वाहनाचे नुसते मार्गनिर्देशन नाही, तर मार्गदर्शनही करावे लागते. हे कार्य अनेक वेळा दूर अंतरावरून स्वयंचलित पद्धतीने केले जाते. अवकाशयानाचे कोणत्याही एका वेळेचा वेग, स्थान व गतिमार्ग माहीत असेल व त्याच्या गतीवर प्रभाव पाडू शकणाऱ्या अवकाशातील इतर जड पदार्थांची स्थाने. वेग व द्रव्यमान माहीत असले, तर रूढ यामिकी [पदार्थावर प्रेरणांची होणारी क्रिया व त्यामुळे निर्माण होणारी गती यांचा अभ्यास करणाऱ्या शास्त्राच्या → यामिकी] गणिताचा उपयोग करून भविष्यात अवकाशयान कोठे असेल याविषयी निश्चित भाकीत करणे शक्य असते. अवकाशयानाचे वर्तमान स्थान व वेग यांचे मापन पृथ्वीवरील मार्ग निरीक्षण करणाऱ्या स्थानकापासून करता येते [→ उपग्रह, कृत्रिम]. मागे वर्णन केल्याप्रमाणे यानाचा वेग काढण्याकरिता डॉप्लर पद्धत वापरतात. याकरिता एका ठराविक कंप्रतेचा रेडिओ संदेश वाहनाकडे पाठवितात. वाहनावरील ग्राहीला संदेशाच्या कंप्रतेत जो बदल झालेला आढळतो त्यावरून यानाच्या सापेक्ष वेगाचे गणन करता येते. स्थानकापासून यानाचे अंतर रेडिओ पद्धतीचाच उपयोग करून काढणे हेही सुलभ असते. या दोन्हीही मापनक्रियांची अचूकता उच्च प्रकारची असावी लागते.

जर अवकाशयानाला अवकाशातील एखाद्या निश्चित ठिकाणी जावयाचे असेल (उदा., चांद्रयान), तर अवकाशयानाकरिता वेग, गतिमार्ग यांविषयी जशी माहिती उपलब्ध असावी लागते तशीच माहिती यानाच्या अवकाशातील लक्ष्याबद्दलही (उदा., चंद्र) माहीत असणे आवश्यक होते. या प्रदत्तामध्ये त्रुटी असण्याचा संभव असतो आणि त्यामुळे अवकाशयानामधूनच लक्ष्याची स्थाननिश्चिती करण्याकरिता फक्त रेडिओ पद्धतीचाच नाही तर प्रकाशीय पद्धतीचाही उपयोग केला जातो. या दोन मापनांचा एकमेकांकरिता पडताळा म्हणून उपयोग होतो. या कार्याकरिता अवकाशातील एका ताऱ्याचे सापेक्ष लक्ष्याच्या अनुस्थितीचे (लक्ष्याचे अक्ष व ताऱ्याचे अक्ष यांच्यातील संबंधांच्या रूपातील लक्ष्याच्या स्थितीचे वा दिक्विन्यासाचे) मापन केले जाते. अवकाशयान ज्या प्रमाणात लक्ष्याच्या जवळ जाते त्या प्रमाणात लक्ष्य व तारा यांमधील कोनीय अंतराचे मापन करून लक्ष्याच्या सापेक्ष यानाचा वेग व स्थान यांचे निर्धारण करता येते. यानावर कार्य करीत असलेल्या मार्गदर्शन प्रणालीमध्ये यानाची प्रत्यक्ष गती व इष्ट गती यांची सतत तुलना केली जात असते. यामध्ये जर फरक आढळला, तर योग्य प्रक्रिया वापरून यानाच्या गतीत सुधारणा अथवा दुरूस्ती केली जाते. यानामध्येच या कामाकरिता एक लहान रॉकेट एंजिन उपलब्ध केलेले असते. पृथ्वीवरच्या नियंत्रण केंद्राद्वारे रेडिओ समादेश देऊन या एंजिनामधील इंधन पेटवून एंजिन काही मर्यादित काळाकरिता चालू करता येते. यानाच्या गतीत बदल एका ठराविक दिशेत करावयाचा असल्यास एंजिन चालू करण्याचा समादेश देण्याआधी यानाची अनुस्थिती आधी योग्य दिशेत आणावी लागते व ही क्रिया दोन टप्प्यांत केली जाते. प्रथम यानाचा दोलन अक्ष आकाशातील कोणत्या तरी ठराविक संदर्भ दिशेकडे वळवितात. बहुधा हा अक्षाचा रोख सूर्याकडे करतात. यानंतर एखादा पूर्वनिर्धारित तारा यानावरील उपकरणाच्या दृष्टीपथात येईल अशा तऱ्हेने दोलन अक्ष बदलला जातो.
यानाच्या अक्षाच्या दिक्विन्यासामधील हा बदल यानामध्ये असलेल्या घूर्णीच्या साहाय्याने केला जातो. ही घूर्णी योजना दिक्विन्यासाचे मापन करू शकते व पृथ्वीवरील नियंत्रण केंद्राकडून येणाऱ्या समादेशानुसार त्यामध्ये आवश्यक तो बदल घडवून आणू शकते. यावरून हे स्पष्ट होते की, यानाच्या गतिमार्गाच्या आरंभ बिंदूपासून ते लक्ष्यापाशी जाईतोपर्यंत मार्गदर्शन प्रणालीची त्यावर सतत देखरेख असते. मार्गक्रमण योग्य प्रकारे होत आहे हे पाहणे व ते तसे होत नसल्यास त्यामध्ये नियंत्रण प्रणालीच्या साहाय्याने फेरफार करणे या सर्व गोष्टींचा मार्गनिर्देशन प्रक्रियेत समावेश होतो. या कार्याकरिता संगणकाचा उपयोग केला जातो. या पद्धतीचे विशदीकरण आ. १६ वरून होईल. ही संगणक योजना तीन टप्प्यांची असते. यांपैकी पहिल्या टप्प्याचा संगणक संकल्पित कार्यानुसार माहिती व आवश्यक समादेश यांचा स्वीकार करतो. उदा., अवकाशयानाचे चंद्रापर्यंत जाऊन त्याभोवती गतिमार्गावर फेऱ्या घालाव्यात असे उद्दीष्ट असेल, तर लक्ष्याचे स्थान व त्याची गती, यांबद्दलची माहिती पुरवावी लागते. हाच संगणक वाहनाकरिता सुयोग्य असा गतिमार्ग निश्चित करतो. वाहनाच्या प्रत्यक्ष गतिमार्गाचे निरीक्षण संवेदक प्रयुक्ती करतात व ही माहिती परत संगणकाला पुरविली जाते त्यामुळे त्यामध्ये जर काही त्रुटी निर्माण झाल्या असतील, तर त्यांचा निरास करण्याकरिता उपाययोजना करता येते.
मार्गदर्शन पद्धतीचे खालील चार प्रकारांत वर्गीकरण करता येते .
शलाका- आरोहण-पद्धत: या प्रकारचे मार्गदर्शन क्षेपणास्त्रामध्ये केले जाते. यांपैकी एका प्रकारामध्ये भूस्थापित स्थानक किंवा समुद्रावरील जहाज किंवा आकाशातील विमान यामधून प्रारण शलाका सोडली जाते. क्षेपणास्त्राचा गतिमार्ग त्याच्या आतमध्ये असणाऱ्या मार्गदर्शन प्रणालीमुळे या शलाकेमध्ये बंदिस्त केला जातो.
लक्ष्यानुगामी पद्धत : यामध्ये परत निष्क्रिय, अर्ध-सक्रिय व सक्रिय असे प्रकार उपलब्ध आहेत. विमानविरोधी क्षेपणास्त्र पहिल्या प्रकारचे असते. जेट विमानाच्या एजिनाच्या मागील भागातून जे ज्वलित वायू निष्कासित होतात (बाहेर टाकले जातात) त्यांपासून अवरक्त प्रारण प्रेषित होते. त्याआधारे हे अस्त्र विमानाचा शोध घेऊन त्यावर आदळते. अर्धक्रियाशील पद्धतीत लक्ष्यापासून परावर्तित होणाऱ्या प्रारणाच्या साहाय्याने लक्ष्याचा शोध घेतला जातो. या पद्धतीत प्रारणाचा उद्गम लक्ष्य किंवा अस्त्र या दोहोंमध्येही नसतो. चांद्रयानामध्ये तिसऱ्या प्रकारची म्हणजे सक्रिय मार्गदर्शन पद्धती वापरली गेली होती. चांद्रयानातून रडार प्रारण प्रेषित केले गेले होते. या प्रारणाचे नियंत्रक अवकाशयानापासून परावर्तन होत होते. परावर्तीत प्रारणाच्या मार्गदर्शक साहाय्याने चंद्रावर उतरलेले यान परत उड्डाण करून अवकाशयानाकडे परतले.
![आ. १७. विमानाचे मार्गदर्शन करण्याकरीता उपयुक्त अशी निरूढी मार्गदर्शक फलाट योजना : (१) प्रवेग, (२) प्रवेगमापक, (३) घूर्णी, (४) पृथ्वीच्या परिभ्रमण अक्षाचा कल लक्षात घेणारा संगणक, (५) अक्षांश आदान, (६) कोरिऑलिस प्रेरणा लक्षात घेणारा संगणक [कोरिऑलिस परिणाम.]](/images/stories/khand13%20internal%20images/408%20%20-%20%201.jpg) निरूढी मार्गदर्शन पद्धती : या मार्गदर्शनाच्या पद्धतीचा लांब पल्ल्याच्या क्षेपणास्त्रासाठी, तसेच मानवसहित अथवा मानवरहितअवकाशयानाकरिता उपयोग केला जातो. रॉकेटच्या गतीचे स्थिरीकरण करण्याकरिता मार्गदर्शन व नियंत्रण प्रणालीचा वापर प्रथम आर्. एच्. गॉडर्ड यांनी १९३२ मध्ये अमेरिकेत केला. धूर्णी व समय नियंत्रण साधनाचा प्रथम वापर जर्मनीमध्ये दुसऱ्या महायुद्धाच्या वेळी ई. स्टाइनहोप व टी. बुखोल्ड यांनी व्ही-२ या द्रव इंधन असलेल्या रॉकेटात केला.आधुनिक क्षेपणास्त्रामध्ये निरूढी मार्गदर्शन पद्धतीचा उपयोग केला जातो. याकरिता वाहनावरची घूर्णी व प्रवेगमापक फलाट यांचा मागे वर्णन केल्याप्रमाणे उपयोग केला जातो. विमानाकरिता उपयुक्त अशा निरूढी मार्गदर्शन योजनेची साधारण कल्पना आ.१७ वरून येईल.
निरूढी मार्गदर्शन पद्धती : या मार्गदर्शनाच्या पद्धतीचा लांब पल्ल्याच्या क्षेपणास्त्रासाठी, तसेच मानवसहित अथवा मानवरहितअवकाशयानाकरिता उपयोग केला जातो. रॉकेटच्या गतीचे स्थिरीकरण करण्याकरिता मार्गदर्शन व नियंत्रण प्रणालीचा वापर प्रथम आर्. एच्. गॉडर्ड यांनी १९३२ मध्ये अमेरिकेत केला. धूर्णी व समय नियंत्रण साधनाचा प्रथम वापर जर्मनीमध्ये दुसऱ्या महायुद्धाच्या वेळी ई. स्टाइनहोप व टी. बुखोल्ड यांनी व्ही-२ या द्रव इंधन असलेल्या रॉकेटात केला.आधुनिक क्षेपणास्त्रामध्ये निरूढी मार्गदर्शन पद्धतीचा उपयोग केला जातो. याकरिता वाहनावरची घूर्णी व प्रवेगमापक फलाट यांचा मागे वर्णन केल्याप्रमाणे उपयोग केला जातो. विमानाकरिता उपयुक्त अशा निरूढी मार्गदर्शन योजनेची साधारण कल्पना आ.१७ वरून येईल.
क्षेपणास्त्राकरिता वापरण्यात येणाऱ्या निरूढी मार्गदर्शन उपकरणाची कल्पना आ. १८ वरून मिळते.
रेडिओद्वारे मार्गदर्शन पद्धत: या पद्धतीत वाहनाच्या गतिमार्गाचे (उदा., अवकाशयान) निरीक्षण भू स्थापित स्थानकाच्याद्वारे केले जाते. मार्गदर्शन करणारे समादेश रेडिओद्वारे वाहनाकडे पाठविले जातात. वाहनाचे तात्कालिक स्थान व गती यांबद्दल निरीक्षणाद्वारे जी महिती मिळते त्यावर हे समादेश आधारित असतात. वाहनावरच उपलब्ध असलेल्या यंत्रणेच्या साहाय्याने त्याच्या गतिमार्गात या समादेशानुसार बदल करण्यात येतात. पृथ्वीवरून रॉकेटाच्या साहाय्याने क्षेपित केलेले अवकाशयान पृथ्वीभोवतालच्या भ्रमणकक्षेत प्रस्थापित होत असते तेव्हा त्याचे मार्गदर्शन मोठ्या प्रमाणात या मार्गदर्शन पद्धतीचा वापर करून केले जाते.
स्थापित स्थानकाच्याद्वारे केले जाते. मार्गदर्शन करणारे समादेश रेडिओद्वारे वाहनाकडे पाठविले जातात. वाहनाचे तात्कालिक स्थान व गती यांबद्दल निरीक्षणाद्वारे जी महिती मिळते त्यावर हे समादेश आधारित असतात. वाहनावरच उपलब्ध असलेल्या यंत्रणेच्या साहाय्याने त्याच्या गतिमार्गात या समादेशानुसार बदल करण्यात येतात. पृथ्वीवरून रॉकेटाच्या साहाय्याने क्षेपित केलेले अवकाशयान पृथ्वीभोवतालच्या भ्रमणकक्षेत प्रस्थापित होत असते तेव्हा त्याचे मार्गदर्शन मोठ्या प्रमाणात या मार्गदर्शन पद्धतीचा वापर करून केले जाते.
मार्गदर्शन पद्धतीच्या प्रत्यक्ष उपयोगाचे वर्णन: चंद्रावर उतरलेल्या अपोलो यानाच्या कामगिरीच्या वर्णनावरून वरील पद्धतीचा प्रत्यक्षात कसा उपयोग केला जातो या विषयीची चांगली कल्पना येते. अवकाशयानाला पृथ्वीभोवतालच्या भ्रमणकक्षेत प्रस्थापित करणाऱ्या सॅटर्न रॉकेटाचे मार्गदर्शन निरूढी पद्धतीने केले होते. घूर्णी व प्रवेगमापक उपकरणे असणारा फलाट उत्क्षेपण क्रियेमध्ये (मुख्य रॉकेटाला साहाय्यभूत असणाऱ्या रॉकेटाच्या क्रियेमध्ये) क्षैतिज दिशेत स्थिर राहील अशी व्यवस्था केली होती. अवकाशयान भ्रमणकक्षेत गेले तेव्हा पृथ्वीवरील नियंत्रक रेडीओ स्थानकाद्वारे त्यांचे निरीक्षण केले गेले व अशा रीतीने त्याच्या भ्रमणकक्षेचा आकार इत्यादींविषयीची माहिती मिळविली गेली. या माहितीचे संगणकाद्वारे परिशीलन करून अवकाशयानाला त्याच्या पुढील प्रवासाकरिता कोणते समादेशक समादेश देणे आवश्यक आहे हे निश्चित केले गेले. हे समादेश रेडिओद्वारे अपोलो यानाला देण्यात आले व त्यानुसार निरूढी मार्गदर्शन पद्धतीचा उपयोग करून यानाच्या गतीत योग्य ते बदल करण्यात आले.
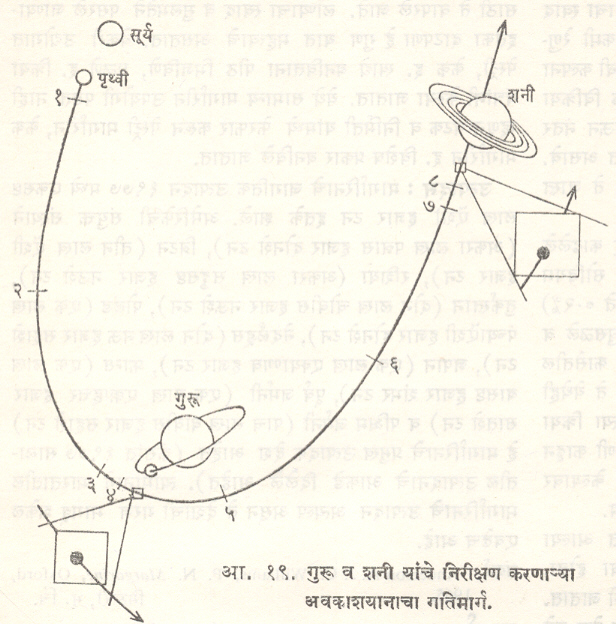 यान चंद्राकडे झेप घेत असताना पृथ्वीवरील स्थानकांना मिळत असलेली मार्गनिर्देशन व मार्गदर्शनविषयक माहिती यानावर असलेल्या संगणकाला सतत पुरविली जात होती. यानामध्ये असलेल्या कोणादर्शाद्वारे प्रकाशीय मापने घेऊन अंतराळवीर अवकाशातील स्थिर ताऱ्याच्या सापेक्ष यानाचा वेग, स्थान इत्यादीबद्दलची माहिती पुरवणी म्हणून याच संगणकाला पुरवीत होते. उत्क्षेपण क्रियेच्या वेळी वापरण्यात आलेल्या निरूढी फलाटाप्रमाणे यानावरही दुसरे एक निरूढी फलाट उपकरण होते. त्यापासून मिळणारी यानाची अनुस्थिती व प्रवेग यांविषयीचा प्रदत्तही पुनःप्रदाय प्रक्रियेचा (प्रदान संदेशाचा काही भाग पुन्हा आदान संदेशात समाविष्ट करण्याच्या प्रक्रियेचा) भाग म्हणून याच संगणकाला पुरविला जात होता. अशा प्रकारे पृथ्वीवरील स्थानकापासून मिळालेला प्रदत्त, अंतराळवीरांना निरीक्षणाद्वारे मिळालेला प्रदत्त, निरूढी फलाट उपकरणापासून मिळालेला प्रदत्त असे तीन प्रकारे मिळालेले प्रदत्त संगणकाला पुरविले होते. यानाच्या गतिमार्गात जे फेरफार अथवा दुरूस्ती करणे आवश्यक होते ते संगणकाने निश्चित केले व त्यानुसार यानावरील एंजिनातील इंधन ज्वलन करण्याचे समादेश देण्यात आले. यानाची चंद्राभोवतालच्या भ्रमणकक्षेत प्रस्थापना शेवटी निरूढी मार्गदर्शन यंत्रणेद्वारे करण्याच आली. याकरिता लागणारे समादेश रेडिओद्वारे पृथ्वीवरील नियंत्रण केंद्रावरून देण्यात आले होते.
यान चंद्राकडे झेप घेत असताना पृथ्वीवरील स्थानकांना मिळत असलेली मार्गनिर्देशन व मार्गदर्शनविषयक माहिती यानावर असलेल्या संगणकाला सतत पुरविली जात होती. यानामध्ये असलेल्या कोणादर्शाद्वारे प्रकाशीय मापने घेऊन अंतराळवीर अवकाशातील स्थिर ताऱ्याच्या सापेक्ष यानाचा वेग, स्थान इत्यादीबद्दलची माहिती पुरवणी म्हणून याच संगणकाला पुरवीत होते. उत्क्षेपण क्रियेच्या वेळी वापरण्यात आलेल्या निरूढी फलाटाप्रमाणे यानावरही दुसरे एक निरूढी फलाट उपकरण होते. त्यापासून मिळणारी यानाची अनुस्थिती व प्रवेग यांविषयीचा प्रदत्तही पुनःप्रदाय प्रक्रियेचा (प्रदान संदेशाचा काही भाग पुन्हा आदान संदेशात समाविष्ट करण्याच्या प्रक्रियेचा) भाग म्हणून याच संगणकाला पुरविला जात होता. अशा प्रकारे पृथ्वीवरील स्थानकापासून मिळालेला प्रदत्त, अंतराळवीरांना निरीक्षणाद्वारे मिळालेला प्रदत्त, निरूढी फलाट उपकरणापासून मिळालेला प्रदत्त असे तीन प्रकारे मिळालेले प्रदत्त संगणकाला पुरविले होते. यानाच्या गतिमार्गात जे फेरफार अथवा दुरूस्ती करणे आवश्यक होते ते संगणकाने निश्चित केले व त्यानुसार यानावरील एंजिनातील इंधन ज्वलन करण्याचे समादेश देण्यात आले. यानाची चंद्राभोवतालच्या भ्रमणकक्षेत प्रस्थापना शेवटी निरूढी मार्गदर्शन यंत्रणेद्वारे करण्याच आली. याकरिता लागणारे समादेश रेडिओद्वारे पृथ्वीवरील नियंत्रण केंद्रावरून देण्यात आले होते.
इ.स. १९७७ मध्ये गुरू व शनी या ग्रहांचे निरीक्षण करण्याकरिता अमेरिकेमधून सोडलेल्या मरिनर अवकाशयानाचा गतिमार्ग आ. १९ मध्ये दाखविला आहे. त्याच्या मार्गदर्शन क्रियेमधील काही टप्प्यांचा आकृतीमध्ये निर्देश करण्यात आला आहे.
(१) या ठिकाणी अवकाशयान पृथ्वीपासून दूर फेकले गेले. त्या वेळी त्याच्या गतिमार्गात आलेले दोष दुरुस्त केले गेले. (२) येथे वरील दुरुस्तीमुळे निर्माण झालेल्या किंवा राहून गेलेल्या चुका दुरुस्त केल्या गेल्या. (३) व (४) येथे केलेल्या मार्गदर्शनामुळे अवकाशयान गुरूच्या नजीकच्या भ्रमणकक्षेत गेले व पुढे (५), (६), (७) व (८) येथे गतिमार्गात दुरुस्त्या करण्यात येऊन यान शनीच्या दिशेने गेले.
पहा : उपग्रह, कृत्रिम उपग्रह संदेशवहन घूर्णी दिक्सूचक रडार रेडिओ संदेशवहन प्रणाली विमानातील उपकरणे सोनार व सोफार.
संदर्भ : 1. Anderson, E. W. The Principles of Navigation, London, 1966.
2. Broxmeyer, C. Inertial Navigation Systems, New York, 1964.
3. Sonneburg, G. J. Radar and Electronic Navigation, Princeton, 1963.
4. Weems, P. V. H. Lee, C. V., Ed., Marine Navigation, St. Annapolis, 1958.
5. Williams, E. B. Branch, E. B. W. J. V. Air Navigation: Theory and Practice, London, 1965.
पुरोहित, पु. ल. चिपळोणकर, व. त्रिं.
परांजपे, म. ह. प्रधान, र. दा.
“