सेवा—यंत्रणा: (सर्व्होमेकॅनिझम). निरीक्षणातील प्रमाद (फरक) किंवा त्रुटी ओळखून ती दुरुस्त करणाऱ्या स्वयंचलित नियंत्रण प्रणालीचा हा एक प्रकार आहे. ही प्रणाली पुन:प्रदाय (परतफेड) तत्त्वावर चालते. प्रमाद-संवेदन पुन:प्रदायाद्वारे प्रणालीचे कार्य यथायोग्य करणे अथवा प्रणालीच्या कार्याचे शोधन (दुरुस्ती) करणे यांसाठी सेवा-यंत्रणा वापरतात. ज्या प्रणालीत पुन:प्रदाय व प्रमाद-शोधन संकेत (आदेश) यांद्वारे यांत्रिक स्थितीचे किंवा तिचा वेग व प्रवेग यांचे नियंत्रण केले जाते, त्या प्रणालीसाठीच ही संज्ञा उचितपणे वापरतात. या प्रकारच्या नियंत्रणामध्ये दिरंगाई झाल्यास प्रचंड नुकसान व जीवितहानीही होऊ शकते. शिवाय या प्रकारचे नियंत्रण पुष्कळदा दूरवरून केले जाते. त्यामुळे आदेशानुसार अपेक्षित बदल झाला की नाही, याची माहिती मिळणे आवश्यक असते.
अनेक अनुप्रयुक्तींमध्ये (उपयोगांमध्ये) सेवा-यंत्रणांमुळे उच्च शक्तीच्या प्रयुक्त्यांचे नियंत्रण खूप कमी शक्ती प्रयुक्त्यांकडून येणाऱ्या संकेतांमार्फत (संदेशांमार्फत) होते. उच्च शक्ती प्रयुक्त्यांचे कार्य प्रमाद संकेतामार्फत चालते. हा संकेत उच्च शक्ती प्रयुक्तीच्या इष्ट स्थितीची विद्यमान स्थितीशी तुलना करून मिळालेला असतो. नियंत्रक संकेताची शक्ती व नियंत्रित प्रयुक्तीची शक्ती यांचे गुणोत्तर अनेक अब्जांशी एक एवढे सूक्ष्म असू शकते.
मूलभूत घटक व तत्त्व : सर्व सेवा-यंत्रणांमध्ये किमान पुढील मूलभूत घटक असतात. नियंत्रित (उच्च शक्ती) प्रयुक्ती, नियंत्रक वा समादेशक (कमी शक्ती) प्रयुक्ती, प्रमाद अभिज्ञातक (त्रुटी ओळखणारा घटक), प्रमाद-संकेत विवर्धक आणि कोणत्याही आवश्यक प्रमादाचे शोधन करणारी प्रयुक्ती म्हणजे सेवा-चलित्र (सर्व्होमोटर). नियंत्रित प्रयुक्तीमध्ये बहुधा स्थान किंवा स्थिती वा गतीचे नियंत्रण होते. म्हणून या प्रयुक्तीमध्ये एक संकेत (उदा., विद्युत् दाब) निर्माण करणारे साधन असावे लागते. या संकेताला पुन:प्रदाय संकेत म्हणतात. हा संकेत त्या प्रयुक्तीची विद्यमान स्थिती दर्शवितो. हा संकेत प्रमाद अभिज्ञाताकडे पाठविला जातो. नियंत्रित प्रयुक्तीला बहुधा प्रणालीबाहेरून माहिती मिळते. ही माहिती नियंत्रित प्रयुक्तीची इष्ट स्थिती दर्शविते. या माहितीचे त्या प्रयुक्तीला वापरता येईल अशा रूपात (उदा., विद्युत् दाब) परिवर्तन होते. नियंत्रित प्रयुक्तीकडून येणाऱ्या संकेताप्रमाणे परिवर्तित रूपातील ही माहिती त्याच प्रमाद अभिज्ञातकाला पुरविली जाते. प्रमाद अभिज्ञातक विद्यमान स्थितीची (पुन:प्रदाय संकेताची) इष्ट स्थितीशी (नियंत्रक संकेताशी) तुलना करतो. [पुष्कळदा हा नियंत्रक संकेत विद्युतीय (उदा., विद्युत् दाब) असून तो ⇨रडारच्या प्रतिसादामार्फत, दाब-संवेदनशील प्रयुक्तीकडून किंवा अगदी प्रकाशसंवेदी प्रयुक्तीकडून मिळतो]. प्रमाद-संकेतात निष्पन्न होणारा कोणताही फरक किंवा विसंगती आढळली, तर हा फरक नियंत्रित प्रयुक्तीला तिच्या इष्ट स्थितीत आणण्यासाठी कराव्या लागणाऱ्या शोधनाचा निदर्शक असतो. हा प्रमाद-शोधन संकेत विवर्धकाकडे पाठविला जातो आणि विवर्धित संकेत (विद्युत् दाब) सेवा-चलित्र चालविण्यासाठी वापरला जातो. नंतर सेवा-चलित्र नियंत्रित प्रयुक्तीची स्थिती परत निश्चित करतो व ती पुन: स्थापित होते. हा फरक शून्य किंवा जवळजवळ शून्य होईपर्यंत सेवा-चलित्राचे काम चालू राहते. विमानात स्वयंचलित विमानचालकाची एक सेवा-यंत्रणा असते. ती विमानाच्या इष्ट मार्गाशी त्याच्या विद्यमान मार्गाची तुलना करते. या दोन्ही मार्गांमधील फरक प्रमाद-संकेताने दर्शविला जातो आणि विमान इष्ट मार्गावर येईपर्यंत हा फरक विमानाच्या नियंत्रणासाठी वापरला जातो. जेव्हा विमान परत इष्ट मार्गावर येते, तेव्हा प्रमाद-संकेत शून्य होतो. सेवा-यंत्रणेच्या या महत्त्वाच्या वैशिष्ट्यांमुळे ती इतर स्वयंचलित नियंत्रण प्रणाल्यांपेक्षा वेगळी आहे.
शाळेतील शिक्षकाच्या पाठावरून पुन:प्रदायाचे तत्त्व समजून घेता येते. यामध्ये पाठ्यपुस्तक समजून घेण्याची विद्यार्थ्यांची कुवत वा आकलनक्षमता या राशीचे नियमन होते. शिक्षक पाठ्यपुस्तकाचे विवरण करणारा व विद्यार्थी केवळ श्रवणभक्ती करणारे असतात, एवढ्यापुरतीच शैक्षणिक प्रक्रिया मर्यादित असल्यास विद्यार्थ्यांकडून जास्त ज्ञानार्जनाची अपेक्षा करता येत नाही. कारण विद्यार्थ्यांना विषय खरोखरच समजला आहे की नाही अथवा जे काही शिक्षकाने शिकविले ते चालू विषयाला धरून होते की नाही, हे जाणून घेण्याचा कोणताही उपाय शिक्षकापाशी नाही, म्हणून शिक्षणामध्ये परीक्षा, चाचण्या घेतात आणि प्रश्न विचारतात. यांतून शिक्षकाला पाठाविषयीचा पुन:प्रदाय उपलब्ध होतो आणि विद्यार्थ्यांना विषय किती चांगला समजला आहे, ते शिक्षकाच्या लक्षात येते. विद्यार्थ्यांना विषय समजून घेण्यात काही त्रुटी असल्यास शिक्षक त्यांत सुधारणा करू शकतो.
वैशिष्ट्यपूर्ण उदाहरणे : दैनंदिन जीवनातही माणूस सेवा-यंत्रणेचे तत्त्व वापरीत असतो. उदा., मोटारगाडी चालविणाऱ्याचा मेंदू मोटारगाडीच्या रस्त्यावरील विद्यमान (प्रत्यक्ष) स्थितीची तिच्या इष्ट (अपेक्षित) स्थितीशी तुलना करतो. मोटारगाडी रस्ता सोडून बाहेर जात असेल, तर डोळे तसा संदेश मेंदूकडे पाठवितात. मग मेंदू डोळ्यांनी पाहिलेल्या मोटारगाडीच्या प्रत्यक्ष व इष्ट स्थितींशी तुलना करतो आणि मोटारगाडी योग्य रीतीने परत रस्त्यावर येईपर्यंत मेंदू हातांना मोटारगाडीचे दिशानियंत्रण (स्टीअरिंग) चाक फिरवीत ठेवायला सांगत असतो.
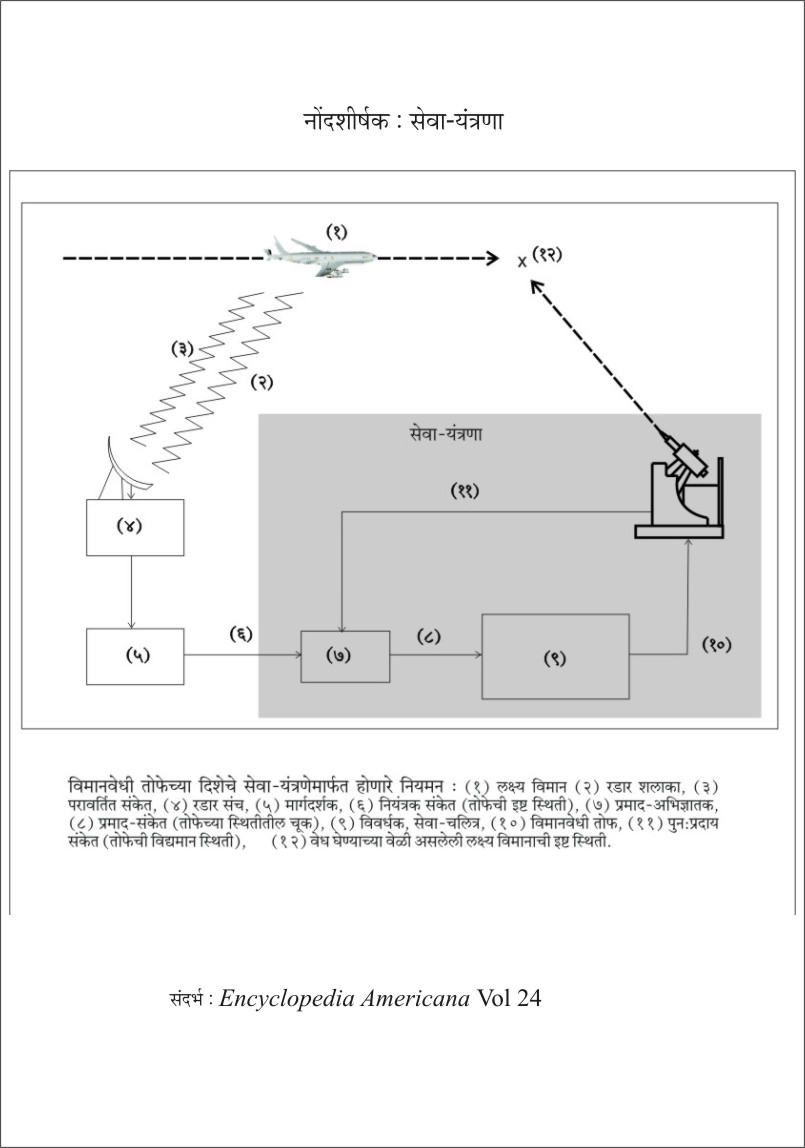 विमानवेधी तोफेच्या माऱ्याची नियामक प्रणाली हे सेवा-यंत्रणेचे दुसरे उदाहरण आहे. अशा प्रणालीत वेध घ्यावयाच्या विमानाकडे म्हणजे लक्ष्य विमानाकडे तोफ रोखण्याचे (व तोफगोळ्यांचा भडीमार करण्याचे) काम सेवा-यंत्रणेच्या मदतीने होते. आकृतीत दाखविल्याप्रमाणे लक्ष्य विमानाच्या (१) मार्गाचे निरीक्षण रडार संचामार्फत (४) होते आणि विमानाच्या लक्ष्य स्थितीविषयीची (१२) माहिती मार्गदर्शकाला (५) मिळते. मग प्रक्षेप्याने (उदा., तोफगोळ्याने) आवश्यक अंतर कापल्यावर ते लक्ष्य विमानावर आदळण्यासाठी तोफ (१०) नेमकी कोणत्या दिशेत रोखायला हवी याचे संगणन केले जाते. सेवा-यंत्रणा तोफेच्या विद्यमान स्थितीची संगणन करून काढलेल्या तोफेच्या इष्ट स्थितीशी तुलना करते. या दोन स्थितींमधील लक्षात आलेला फरक म्हणजे प्रमाद-संकेत (८) होय. त्यानंतर या संकेताचे विवर्धन होते व त्याचा उपयोग सेवा-चलित्र (९) चालविण्यासाठी होतो. सेवा-चलित्र तोफ हलवून तिची स्थिती बदलत राहते. तोफेच्या दिशेत असलेली त्रुटी नगण्य किंवा शून्य होईपर्यंत सेवा-यंत्रणेचे तोफेची दिशा बदलण्याचे काम चालू राहते. अशा रीतीने लक्ष्य विमानाचा अचूक वेध घेण्यासाठी सेवा-यंत्रणेचा उपयोग होतो.
विमानवेधी तोफेच्या माऱ्याची नियामक प्रणाली हे सेवा-यंत्रणेचे दुसरे उदाहरण आहे. अशा प्रणालीत वेध घ्यावयाच्या विमानाकडे म्हणजे लक्ष्य विमानाकडे तोफ रोखण्याचे (व तोफगोळ्यांचा भडीमार करण्याचे) काम सेवा-यंत्रणेच्या मदतीने होते. आकृतीत दाखविल्याप्रमाणे लक्ष्य विमानाच्या (१) मार्गाचे निरीक्षण रडार संचामार्फत (४) होते आणि विमानाच्या लक्ष्य स्थितीविषयीची (१२) माहिती मार्गदर्शकाला (५) मिळते. मग प्रक्षेप्याने (उदा., तोफगोळ्याने) आवश्यक अंतर कापल्यावर ते लक्ष्य विमानावर आदळण्यासाठी तोफ (१०) नेमकी कोणत्या दिशेत रोखायला हवी याचे संगणन केले जाते. सेवा-यंत्रणा तोफेच्या विद्यमान स्थितीची संगणन करून काढलेल्या तोफेच्या इष्ट स्थितीशी तुलना करते. या दोन स्थितींमधील लक्षात आलेला फरक म्हणजे प्रमाद-संकेत (८) होय. त्यानंतर या संकेताचे विवर्धन होते व त्याचा उपयोग सेवा-चलित्र (९) चालविण्यासाठी होतो. सेवा-चलित्र तोफ हलवून तिची स्थिती बदलत राहते. तोफेच्या दिशेत असलेली त्रुटी नगण्य किंवा शून्य होईपर्यंत सेवा-यंत्रणेचे तोफेची दिशा बदलण्याचे काम चालू राहते. अशा रीतीने लक्ष्य विमानाचा अचूक वेध घेण्यासाठी सेवा-यंत्रणेचा उपयोग होतो.
पृथ्वीवरच्या स्थानकावरील संदेशवहनाकरिता कृत्रिम उपग्रह मार्गनिरीक्षक आकाशक हे सेवा-यंत्रणेचा उपयोग करणारे आणखी एक वैशिष्ट्यपूर्ण उदाहरण आहे. शक्य तेवढा सर्वांत तीव्र (प्रबल) संकेत ग्रहण करण्याच्या व प्रेषित करण्याच्या दृष्टीने हा आकाशक थेट संदेशवहन उपग्रहाकडे रोखलेला ठेवणे हे यामागील उद्दिष्ट असते. ते साध्य करण्याची एक पध्दत पुढे दिली आहे. आकाशकांवर दोन व अधिक ग्राही घटक जवळजवळ असतात. हे घटक उपग्रहाकडून आलेल्या संकेतांची (संदेशांची) तुलना करतात. त्यांनी ग्रहण केलेल्या संकेतांच्या तीव्रतांमधील फरकातून शोधन संकेत निष्पन्न होतो आणि तो विवर्धित करून आकाशकांच्या सेवा-चलित्राकडे पाठविला जातो. या अखंड पुन:प्रदाय पद्धतीमुळे पृथ्वीवर आकाशक भूपृष्ठापासून ३७,००७ किमी. उंचीवर असलेल्या उपग्रहाकडे अतिशय अचूकपणे रोखलेला राहू शकतो. ही अचूकता सेंटिमीटराच्या काही शतांश भागाइतकी सूक्ष्म असते.
उपयोग : एंजिनांचे गतिनियमन, जहाजांचे स्वयंचलित चालन व सुकाणूची स्थाननिश्चिती (स्टीअरिंग) (उदा., सागरी मार्गनिर्देशनाची सामग्री), तोफांचे स्वयंचलित नियमन आणि विद्युत्-यांत्रिकीय अनुरूप संगणक यांमध्ये प्रथम सेवा-यंत्रणा वापरण्यात आल्या. नंतर जवळजवळ प्रत्येक औद्योगिक क्षेत्रात सेवा-यंत्रणा वापरल्या जाऊ लागल्या. उदा., विभक्त भाग निर्मितीच्या कर्तन हत्यारांसारखी स्वयंचलित यांत्रिक हत्यारे, पोलादाचे लाटण, कागदाचे मृदुकरण (कॅलेंडरिंग) व अंतिम संस्करण, उच्च गतीने करण्यात येणारी छपाई, यांसारख्या उद्योगांतील चादरी व जाळ्या तयार करण्याच्या प्रक्रियांमध्ये सेवा-यंत्रणा वापरतात. उच्चालक, रोबॉट, दूरवर्ती हाताळणी यंत्रे, दूरप्रचालक अवकाशयाने, अणुविक्रियक (अणुभट्ट्या), मोठी यंत्रसामग्री, मार्गदर्शित क्षेपणास्त्रे, रंगीत नियतकालिकांचे मुद्रण, वैज्ञानिक संशोधन, रसायन उद्योग, तसेच गुडघे, बाहू यांसारखे कृत्रिम अवयव आणि इतर अनेक अनुप्रयुक्तींमध्ये सेवा-यंत्रणा वापरतात. यांशिवाय फीत, पटल व तबकडी चालन, कृत्रिम उपग्रहांचे मार्गनिरीक्षक आकाशक, दूरदर्शकावरील खगोलीय मार्गनिरीक्षक प्रणाली, स्वयंचलित मार्गनिरीक्षक प्रणाली, जहाज व विमाने यांचे मार्गनिर्देशन वगैरेंमध्ये सेवा-यंत्रणांचा वापर केला जातो. स्नायूच्या आचक्यापेक्षाही सौम्य संकेताला प्रतिसाद देऊन सेवा-यंत्रणा मोठ्या व अवजड पिंडांचे नियंत्रण करतात. उदा., जगातील अनेक मोठ्या वेधशाळांमध्ये ताऱ्यांकडून येणाऱ्या कमी तीव्र प्रकाशाने अवजड दूरदर्शकांची गती सेवा-यंत्रणांमार्फत नियंत्रित करतात आणि याची अचूकता सेंटिमीटराच्या अब्जांशाएवढी सूक्ष्म असते. विशेषत: माणसाला अवघड असलेल्या व अप्रिय वाटणाऱ्या कामांमध्ये सेवा-यंत्रणा वापरतात.
पहा : ऊर्जापरिवर्तक दिक्सूचक दूरवर्ती नियंत्रण प्रणाली प्रणमनांकमापन प्रणाली अभियांत्रिकी मार्गनिर्देशन रोबॉट वजन यंत्रे वातविवर वेगमापक वैमानिकी वैमानिकीय अभियांत्रिकी स्वयंचालन.
संदर्भ : 1. Biernson, G. Principles of Feedback Control, 2 Vols., 1988.
2. Bukstein, E. J. Basic Servomechanisms, 1963.
3. Dote, Y. Kinoshita, S. Eds. Brushless Servomotors : Fundamentals and Applications, 1990.
4. Electrocraft Corp., Handbook of D. C. Motors, Speed Controls and servo systems, 1980.
5. James, H. M. and others, Theory of Servomechanisms, 1964.
6. Kurman, K. J. Feedback Control : Theory and Design, 1964.
7. Pickett, R. T. Feedback Control Systems for Technicians, 1988.
8. Sante, D. P. Automatic Control System Technology, 1980.
9. Walters R. B. Ed., Hydraulic and Electro-Hydraulic control Systems, 1992.
10. Wilson, D. R., Ed., Modern Practice in Servo Design, 1971.
ठाकूर, अ. ना.
“