रोबॉट : मानवी प्रयासांची जागा घेणारे स्वयंचलित यंत्र अशी रोबॉटाची स्थूल व्याख्या करता येईल. मात्र असे यंत्र दिसण्यात मानवासारखेच असेल वा मानवाप्रमाणेच कार्य करेल असे नाही. इंग्रजीत रूढ झालेली रोबॉट ही संज्ञा चेक भाषेतील robota या शब्दावरून आलेली असून तिचा अर्थ वेठ (मोबदल्याविना करून घेतलेले काम) असा आहे. या संज्ञेचा आधुनिक उपयोग कारेल चापेक या चेक नाटककारांनी १९२० मध्ये लिहिलेल्या R. U. R. (रॉसम्स युनिव्हर्सल रोबॉट्स) या नाटकातून रूढ झाला. या नाटकात कोणत्याही प्रकारचे बौद्धिक वा शारीरिक काम करू शकणाऱ्या रोबॉट नावाच्या यांत्रिक कामगारांवर अवलंबून राहू लागलेल्या समाजाचे चित्रण केलेले आहे.
इतिहास व विकास: रोबॉट या संज्ञेची व्याख्या किती संदिग्धपणे केली आहे त्यानुसार त्यांच्या पूर्वजांचा मागोवा प्राचीन ईजिप्तमध्ये आढळलेल्या प्रयुक्तींपर्यंत घेणे शक्य आहे. त्या काळी धर्मगुरू मंदिराचे दरवाजे उघडण्यासाठी वाफेने कार्यान्वित होणाऱ्या यंत्रणा वापरीत व आपल्या गूढ सामर्थ्याची लोकांवर छाप पाडीत. प्राचीन ग्रीकांनी मानवी शरीराच्या हालचालींचा अभ्यास करण्यासाठी व भौतिक तत्त्वांचे निदर्शन करण्यासाठी सांधेयुक्त पुतळे तयार केले होते. होमर या ग्रीक कवींनी इलिअड या आपल्या महाकाव्यात अग्नी, धातुकर्म व यंत्रशास्त्र यांचा देव हीफिस्टस यांची सेवा दोन सोनेरी यांत्रिक स्त्री पुतळे करीत असत, असा उल्लेख केलेला आहे. प्राचीन चिनी व इथिओपियन लोकांनीही पाण्याच्या या वाफेच्या शक्तीवर हालचाल करणारे पुतळे तयार केले होते. बायझंटीन व काही प्राचीन अरब लोकांनी पाणघड्याळ केले होते. बायझंटीन व काही प्राचीन अरब लोकांनी पाणघड्याळ जोडलेल्या विविध प्रकारच्या स्वयंचलित प्रयुक्त्या तयार केल्या होत्या. कथासरित्सागर या अकराव्या शतकातील भारतीय संस्कृत कथासंग्रहात यांत्रिक बाहुल्यांचा उल्लेख आढळते. यूरोपात फ्रेंच, जर्मन व इंग्रज लोकांनी सांधेयुक्त खेळणी खेळांमध्ये व राजकुटुंबियांची करमणूक करण्यासाठी वापरली. अठराव्या शतकात त्येर व आंरी झाक-ड्रॉझ या स्विस बंधूंनी शोभिवंत घडाळ्यातील घंटांवर तासाचे टोल वाजविण्यासाठी वापरण्यात येणारी यांत्रिक छोटी माणसे तयार करण्याच्या कलेत मोठी प्रगती करून त्यांनी वाद्य वाजविणारी आणि लेखणी कागदावर ठेवून लिहिणे व चित्रे काढणे या क्रिया करणाऱ्या स्प्रिंगचलित माणसांची रचना केली. १८०१ मध्ये झोझेफ झाकार यांनी छिद्रित कार्डांनी नियंत्रित करता येणारा व ही कार्डे बदलून आकृतिबंध बदलता येणारा विणकामाचा माग तयार केला [⟶ विणकाम]. अमेरिकेत स्यूअर्ड बॅबिट यांनी १८९२ मध्ये तयार केलेल्या चलित्रयुक्त (यांत्रिक उर्जा पुरविणाऱ्या साधनाने युक्त) यारीमध्ये बिजागरीयुक्त पंजा होता आणि तो भट्टीमध्ये पोहोचेल व गरम पोलादाचा पिंड धरून तो बाहेर काढून इष्ट त्या ठिकाणी ठेवेल, अशी योजना केलेली होती.
आज रोबॉट ही संज्ञा ज्या अर्थाने वापरली जाते त्या अर्थाने वरीलपैकी कोणत्याच प्रयुक्त्यांना रोबॉट म्हणता येणार नाही परंतु प्रत्येक टप्प्यात संबंधित तंत्रविद्येची कोणत्या ना कोणत्या प्रकारे प्रगती होत गेली. उदा., यंत्रणेला शक्ती पुरविणे, सांध्यातील घटक, गतीचे कार्यक्रमण व नियंत्रण, यांत्रिक हात (पंजा) विकसित करणे वगैरे. त्यानंतरच्या प्रगतीमुळे अधिक विविध प्रकारच्या क्षमता प्रचारात येऊन त्यांची परिणती आजच्या रोबॉटामध्ये झाली. वर उल्लेखिलेल्या तंत्रविद्येखेरीज आधुनिक रोबॉटामध्ये सेवाचलित्रे [⟶ सेवा-यंत्रणा], प्रकाशीय सांकेतक (प्रकाशविद्युत् प्रयुक्त्यांवर टाकलेल्या प्रकाश शलाका खंडित करून स्थितीसंबंधीच्या माहितीचे अंकीय माहितीत रूपांतर करणारे साधन), पुनःप्रदाय क्रियेद्वारे (प्रणालीच्या प्रदानाचा काही भाग पुन्हा आदानाला देण्याच्या क्रियेद्वारे) करण्यात येणारी सुधारणा व नियंत्रण, सूक्ष्म इलेक्ट्रॉनिकी, संगणक, उच्च-स्तरीय भाषांतील कार्यक्रमण [⟶ संगणक कार्यक्रमण ] व सुविकसित संवेदक (तापमान, दाब, प्रवाहाचा वेग किंवा प्रकाश, ध्वनी वा रेडिओ तरंग यांची तीव्रता यांसारख्या भौतिक राशींचे मूल्य वा त्यांतील बदल समजणारे व त्याचे एखाद्या माहिती-संग्राहक प्रणालीकरिता उपयुक्त आदान संकेतात रूपांतर करणारे साधन) या सर्वांचा समावेश करण्यात आलेला आहे. असा रोबॉट शीघ्र-क्रियाशील, अचूक यंत्राच्या स्वरूपाचा असून तो एकेकाटा किंवा एखाद्या मोठ्या प्रणालीचा भाग म्हणून विश्वसनीय रीत्या काम करतो.
यातील बराचसा विकास १९४०-६० या काळात झाला व त्यातील काही दुसऱ्या महायुद्धातील गरजांमुळे झाला. १९४६ मध्ये जे. पी. एकर्ट व जे. डब्ल्यू. मॉकली यांनी पहिला मोठा इलेक्ट्रॉनीय संगणक (ENIAC) तयार केला आणि पुढे १९७० नंतरच्या दशकात लघुसंगणक व त्यापुढील दशकात सूक्ष्मसंगणक विकसित झाल्यावर संगणक-आधारित रोबॉट तयार करणे सुलभ झाले. याच काळात किरणोत्सर्गी (भेदक कण वा किरण बाहेर टाकणारी) द्रव्ये सुरक्षितपणे हाताळण्याचा दृष्टीने रोबॉटाचा हस्तक्रियाकारक (बाहू किंवा अधिक अचूकपणे म्हणजे रोबॉटाच्या पायाच्या संदर्भात विविध प्रकारच्या नियंत्रित गती असू शकणारी यांत्रिक साखळी) विकसित करण्यात आला. याकरिता सेव्य-सेवक दूरहस्त क्रियाकारक प्रणाली आरगोन नॅशनल लॅबोरेटरीजमध्ये तयार करण्यात आली. या प्रणालीत यांत्रिक साखळीचे दुवे सरळ एका भिंतीतून पलीकडे नेलेले होते आणि त्यामुळे सुरक्षित अंतरावरून माणूस सेव्य बाजूची हालचाल करू शकत असे व प्रणालीची सेवक बाजू धोकादायक कार्य करीत असे[⟶ दूरवर्ती नियंत्रण प्रणाली]. यांमध्ये सांधे, अक्ष व मुक्तता मात्रा (प्रणालीची अवकाशातील मांडणी जितक्या प्रकारे बदलू शकते ती संख्या) यांसंबंधी अवगत झालेल्या माहितीचा आधुनिक रोबॉटात बऱ्याच प्रमाणात उपयोग करण्यात आलेला आहे. १९५० नंतरच्या दशकात मॅसॅचूसेट्स इन्स्टिट्यूट ऑफ टेक्नॉलॉजीच्या लिंकन लॅबोरेटरीजमध्ये या प्रणालीत सेव्य बाजूला ‘स्पर्शज्ञान’ व सेवक बाजूला हळूवार संपर्क देण्यासाठी स्पर्श संवेदक व पुनःप्रदाय यांचा समावेश करण्यात आला. यांचाही आजच्या रोबॉटात अंतर्भाव करण्यात आला आहे. दूरचालक प्रणाली या आणखी एका विकसित करण्यात आलेल्या प्रणमालीत सेव्य व सेवक यांतील यांत्रिक दुव्याच्या जागी स्विचे, बटणे वा नियंत्रक दांडी बसविलेल्या नियंत्रक पेटीतून तारा वा रेडिओ संकेत यांच्या द्वारे दुवा सांधलेला होता. ही वैशिष्ट्ये आधुनिक रोबॉटाच्या शिकवण लोलकात (रोबॉटाच्या कार्यक्रमण निर्मितीकरिता वापरण्यात येणाऱ्या व त्याला लवचिक केबलीने जोडलेल्या साधनात) अंतर्भूत केलेली आढळतात. तथापि त्या काळात वरील सर्व गोष्टींच्या सतत नियंत्रणासाठी मानवाचे साहाय्य अत्यावश्यक असल्याने खऱ्या अर्थाने रोबॉट उपलब्ध नव्हता. १९६० नंतरच्या दशकात स्टॅनफर्ड विद्यापीठातील संशोधकांनी हस्तक्रियाकारकाच्या हालचालींसाठी व नियंत्रणासाठी दूरचालकाच्या सेव्य बाजूकडील मानवाच्या जागी संगणकाचा उपयोग केला.
याच काळात जलद विकास पावलेल्या व रोबॉट अभियांत्रिकीला साहाय्यभूत ठरलेल्या इतर तांत्रिक क्षेत्रांत दुर्बल किंवा कुचकामी सांध्यांना आधार देण्यासंबंधीचे वैद्यकीय व अभियांत्रिकीय शास्त्र, ⇨जैव इलेक्ट्रॉनिकी, नाहीशा झालेल्या भागांच्या जागी कृत्रिम भाग बसविण्यासंबंधीचे शस्त्रक्रिया शास्त्र व दंतवैद्यक यांतील विशेष विभाग, अंकीय नियंत्रित गतीचे कार्यक्रमण [⟶ यांत्रिक हत्यारे], उच्च-स्तरीय संगणक भाषा, दूरचित्रवाणी कॅमेरा वा अन्य प्रकारे यंत्राला प्राप्त करून देण्यात येणाऱ्या दृष्टीविषयीचा प्रारंभ वगैरेंचा समावेश होता.
 जॉर्ज डेव्हल यांनी १९४६ मध्ये यंत्राची प्रक्रिया नियंत्रित करण्यासाठी एक चुंबकीय नियंत्रक विकसित केला. याच्या साहाय्याने यंत्राची इष्ट गती व क्रिया यांचे कार्यक्रमण करणे, हा कार्यक्रम साठवण प्रयुक्तीवर (उदा., चुंबकीय फितीवर) नोंदविणे व जरूरीप्रमाणे पुन्हा कार्यक्रमण करणे या गोष्टी करता येऊ लागल्या. हा कार्यक्रम चालू केल्यास प्रक्रिया शिकविल्याप्रमाणे पुनःपुन्हा केली जाऊन थांबण्याचा आदेश देईपर्यंत चालू राहील, अशीही यामुळे सोय झाली. कार्यक्रमण करता येणाऱ्या औद्योगिक यंत्रसामग्रीची ही सुरुवात होती आणि १८५४ मध्ये डेव्हल यांनी याचा उपयोग करून बाहूच्या टोकाला हत्यार-जोडणी (यात पंजा आणि वितळजोडकामाची -वेल्डिंगची-अग्रे व रंगलेप फवारणी यंत्र यांसारख्या खास हत्यारांचा समावेश होतो) केलेला पहिला कार्यक्रमणशील औद्योगिक रोबॉटतयार केला. याच सुमारास उद्योगाखेरीज इतर क्षेत्रांत उपयोगी पडतील अशा रोबॉटांचे आद्य नमुने विकसित करण्यात येत होते.
जॉर्ज डेव्हल यांनी १९४६ मध्ये यंत्राची प्रक्रिया नियंत्रित करण्यासाठी एक चुंबकीय नियंत्रक विकसित केला. याच्या साहाय्याने यंत्राची इष्ट गती व क्रिया यांचे कार्यक्रमण करणे, हा कार्यक्रम साठवण प्रयुक्तीवर (उदा., चुंबकीय फितीवर) नोंदविणे व जरूरीप्रमाणे पुन्हा कार्यक्रमण करणे या गोष्टी करता येऊ लागल्या. हा कार्यक्रम चालू केल्यास प्रक्रिया शिकविल्याप्रमाणे पुनःपुन्हा केली जाऊन थांबण्याचा आदेश देईपर्यंत चालू राहील, अशीही यामुळे सोय झाली. कार्यक्रमण करता येणाऱ्या औद्योगिक यंत्रसामग्रीची ही सुरुवात होती आणि १८५४ मध्ये डेव्हल यांनी याचा उपयोग करून बाहूच्या टोकाला हत्यार-जोडणी (यात पंजा आणि वितळजोडकामाची -वेल्डिंगची-अग्रे व रंगलेप फवारणी यंत्र यांसारख्या खास हत्यारांचा समावेश होतो) केलेला पहिला कार्यक्रमणशील औद्योगिक रोबॉटतयार केला. याच सुमारास उद्योगाखेरीज इतर क्षेत्रांत उपयोगी पडतील अशा रोबॉटांचे आद्य नमुने विकसित करण्यात येत होते.
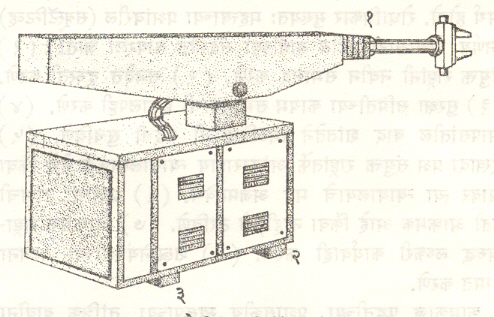
युनिमेट २००० हा १९६१ मध्ये प्रत्यक्ष औद्योगिक उपयोगात आणण्यात आलेला पहिला व्यावहारिक रोबॉट होता व तो मुद्रा ओतकाम यंत्राच्या [⟶ मुद्रा-२ ] कार्याकरिता वापरण्यात आला.या द्रवीय-चलित (द्रवाद्वारे प्रेषित करण्यात येणाऱ्या शक्तीवर कार्य करणाऱ्या) रोबॉटाचा अभिकल्प (आराखडा) अवजड कार्याकरिता करण्यात आलेला होता आणि तो प्रथम जपानमध्ये व नंतर अमेरिकेत मोठ्या प्रमाणात वापरण्यात आला. या रोबॉटाचा विकास मुख्यत्वे जॉर्ज डेव्हल व जे. एफ्.एंगेलबर्गर यांच्या प्रयत्नांतून झाला. डेव्हल यांना कार्यक्रमणशील हस्तक्रियाकारकाचे एकस्व (पेटंट) ही मिळाले. एंगेलबर्गर यांनी डेव्हल यांच्याबरोबर उद्योगांत रोबॉटांचा उपयोग करण्याकरिता चालना देण्याच्या दृष्टीने सहकार्य केले आणि त्या दोघांनी मिळून युनिमेशन ही रोबॉट तयार करणारी कंपनी स्थापन केली. त्यानंतर थोड्याच काळात अमेरिकन मशीन अँड फाऊंड्री या कंपनीने व्हर्साट्रान प्रकारचे रोबॉट तयार केले आणि मग इतरही कंपन्यांनी औद्योगिक रोबॉट तयार करण्यास प्रारंभ केला. सिको या जपानी कंपनीने त्याच सुमारास एक साधा पण अचूक व विश्वसनीय अशा वातचलित (दाबाखालील हवेच्या शक्तीवर चालणाऱ्या) रोबॉटाचा घड्याळांच्या जुळणीसाठी मोठ्या प्रमाणावर उपयोग केला. वरील सर्व रोबॉट शिकवणे व पुनरावृत्ती करणे या प्रकारचे म्हणजे फक्त अगोदर कार्यक्रमणाने ठरविलेल्या नित्यक्रमाप्रमाणे कार्य करणारे आणि नवीन प्रकारचे कार्य करण्यासाठी थांबवून पुन्हा कार्यक्रमण करावे लागणार होते. तथापि १९७३ मध्ये सिनसिनॅटी मिलॅक्रॉन या कंपनीने T3 हा लघुसंगणकाने नियंत्रित करण्यात येणारा व संगणकाद्वारे पुन्हा कार्यक्रमण करता येणारा रोबॉट प्रचारात आणला. आता रोबॉटांना प्रत्येक अक्षराकरिता वेगळा ⇨ सुक्ष्मप्रक्रियक तसेच दृष्टी, उच्च वेगाने मोठ्या प्रमाणावर संगणन करणे, सुरक्षितता व एकूण प्रणालीचा समतोल यांकरिता जादा सूक्ष्मप्रक्रियक आणि या सर्वांचे नियंत्रण करण्यासाठी एक मुख्य सूक्ष्मसंगणक यांची जोड दिलेली असते. त्यांत संगणकाला त्यांची स्थिती दर सेकंदाला ५०-६० वेळा कळविण्यासाठी प्रत्येक अक्षावर सेवा-नियंत्रित चलित्रे व सांकेतक असतात. अधिकाधिक सुविकसित व कमी खर्चाचे विविध संवेदक त्यांत वापरण्यात येत आहेत. रोबॉटांना आता दृष्टी व स्पर्श यांच्या संवेदना देण्यात आलेल्या असून एखाद्या वस्तूचे अंतर, आकारमान व तापमान ते सांगू शकतात आणि इतर गोष्टी ते मानवापेक्षा अधिक जलद, अधिक अचूक व अधिक सुसंगतपणे करू शकतात. ते चालणे, पायऱ्या चढणे, ऐकणे व दिलेल्या तोंडी सूचना पाळणे यांसारख्या क्रिया करू शकतात.
व्याख्या : ऐतिहासिक दृष्ट्या रोबॉट ही संज्ञा मोघमपणे आणि जवळजवळ कोणत्याही पुनःप्रदाय-नियंत्रित यांत्रिक प्रणालीसाठी वापरण्यात आलेली आहे. अलीकडील काळात रोबॉटमध्ये जलद प्रगती झालेली असून ती पुढेही सतत चालू असल्याने भविष्यकाळातही समर्पक ठरेल अशी त्यांची व्याख्या देणे अवघड आहे. ‘यंत्रनिर्मित मानव’, ‘मानवासारखे दिसणारे व चालणे किंवा बोलणे यांसारख्या जटिल मानवी क्रिया करू शकणारे यंत्र’ वगैरे अनेक प्रकारे रोबॉटाची व्याख्या करण्यात आलेली आहे परंतु या व्याख्या समाधानकारक नाहीत. रोबॉट हा मनुष्यासारखा दिसला पाहीजे अथवा त्याच्या शरीराची मापे मानवी शरीरासारखी असली पाहिजेत अशी मुळीच आवश्यकता नाही. खरे म्हणजे अशी वैशिष्ट्ये काही बाबतींत गैरसोयीची ठरण्याची शक्यता आहे. औद्योगिक अनुप्रयोगांकरिता वापरण्यात येणारा संगणक-नियंत्रित यांत्रिक हस्तक्रियाकारक हा उदहारणावरून व्याख्या देण्याच्या दृष्टीने विचारात घेणे, हा वाजवी मध्यममार्ग म्हणता येईल. रोबॉट इन्स्टिट्यूट ऑफ अमेरिका या संस्थेने रोबॉटाची व्याख्या ‘विविध प्रकाराची कार्ये करण्याची बदलत्या कार्यक्रमित गतींद्वारे विविध पदार्थ, भाग हत्यारे वा विशिष्ट प्रयुक्ती यांची हालचाल करण्यासाठी अभिकल्पित केलेला, पुन्हा कार्यक्रमण करता येणारा, नानाविध कार्ये करू शकणारा हस्तक्रियाकारक’ अशी केली आहे. ही व्याख्या सुद्धा काही वर्षांपूर्वी केलेली असल्याने त्यानंतर झालेली प्रगती विचारात घेण्यासाठी ही व्याख्या सुद्धा सुधारणे आवश्यक ठरेल. कोणत्याही नवीन व्याख्येत रोबॉट हा उत्तम प्रकारचे सांधे असलेला असण्याची आवश्यकता लक्षात घेतली पाहीजे. त्याच्या बाहूला किमान तीन मुक्तता मात्रा असल्या पाहीजेत आणि त्याला अतिरिक्त सांधे असलेले मनगट व पंजा हे असले पाहिजेत. खऱ्या रोबॉटामध्ये नियंत्रक, संगणक, स्मृती, संवेदक व संवृत-वलय पुनःप्रदाय प्रणाली [⟶ नियंत्रण प्रणाली] या स्वरूपात ‘बुद्धिमत्ता’ असणे आवश्यक आहे. मानवी हस्तक्षेपाशिवाय त्याला स्वयंचलितपणे व स्वायत्तपणे कार्य आले करता आले पाहिजे. केवळ यंत्रणेपेक्षा त्यात अधिक गुण असले पाहिजेत ते उपयुक्त कार्य करू शकणारे यंत्र असणे आवश्यक आहे.
प्रारंभीचे रोबॉट सर्वसाधारण उद्दिष्टाकरिता (खास उद्दिष्टाच्या विरुद्ध) वापरावयाची हत्यारे म्हणून गणले जात होते परंतु नवीन नमुने प्रचारात आल्यावर काही रोबॉट विशिष्ट कार्याकरिता अभिकल्पित करण्यात आले. आता रोबॉटांचे अधिक स्पष्ट वर्णन करण्यासाठी रंग देणारा रोबॉट, वितळजोडकाम करणारा रोबॉट, सामग्री हाताळणारा रोबॉट, इलेक्ट्रॉनीय घटकांची जुळणी करणारा रोबॉट वगैरे प्रकारे वर्गवारी करणे योग्य ठरते. अशा प्रत्येक रोबॉटाला त्याच्या क्षमतेनुसार चढता दर्जा देता येईल. अशा प्रत्येक रोबॉटाला नावेही देता येतील (कोष्टकात दिलेली रोबॉटांची नावे व्ही. ए अल्तामुरो यांनी सुचविलेली आहेत) आणि त्यांकरिता मानवसदृश दिसणारा किंवा मानवी आकारमानाचाही असणारा रोबॉट व तसा नसणारा रोबॉट यांत फरक करता येईल. कोष्टकात दर्शविलेले रोबॉटांचे सर्वच प्रकार अस्तित्वात आहेत असे नाही व त्यांपैकी काही कधीच निर्माण केले जाणार नाहीत. १९९० पावेतो ह्युमॅनॉइड, सायबोर्ग, सायमॅन, हायबोर्ग व सुपरसायमॅन या प्रकारचे रोबॉट अस्तित्वात आलेले नव्हते.
|
रोबॉटांचे नामाभिधान |
||
|
चढत्या क्रमाने क्षमता |
मानवासारखा दिसत नसल्यास नाव |
मानवासारखा दिसत असल्यास व मानवासारखे आकारमान असल्यास नाव |
|
पूर्वमुद्रित कार्यक्रमानुसारच कार्य करणारा |
ऑटोमॅटन |
ऑटोमॅन |
|
आणि गतिशीलही असलेला |
मेकॅनॉइड |
मेकॅड्रॉइड |
|
आणि त्यामध्ये संगणक व संवेदक असलेला |
अँड्रॉइड |
ह्युमॅनॉइड |
|
आणि अनुकूली व अनुभवावरून शिकण्याची क्षमता असलेला |
सायबोर्ग |
सायमॅन |
|
आणि मानवापेक्षा अधिक भौतिक व मानसिक क्षमता असलेला |
हायबोर्ग |
सुपरसायमॅन |
 रोबॉटाची शरीररचना : सर्व रोबॉटांत विशिष्ट मूलभूत विभाग असतात व काहींत अतिरीक्त क्षमता देण्यासाठी अधिक घटक असतात. सर्व रोबॉटांत शक्ती उद्गम (यांत्रिक, विद्युत्, विद्युत् यांत्रिक, वायवीय, द्रवीय किंवा यांचा संयोग असलेला) आणि त्याच्या हस्तक्रियाकारकाची (म्हणजे त्याच्या दुव्यांच्या जुळवणीची यालाच काही वेळा शरीर, खांदा बाहू व मनगट म्हणतात) हालचाल करण्यासाठी शक्तीचे प्रेषण करण्याचे साधन यांची आवश्यकता असते. शक्तीचे प्रेषण करण्याची दंतचक्रे, ⇨ कॅम, दंड, साखळ्या, चलित्रे, पंप वगैरे साधने वापरली जातात. काही रोबॉटांना अचल पाया असून त्याद्वारे हस्तक्रियाकारक जमीन, भिंत, खांब वा छत यांना जोडलेला असतो. काहींना चाके, साखळीपट्टे, रूळ वा ‘पाय’ यांसारखे गतिसाहाय्यक घटक असतात. सर्व रोबॉटांत नियंत्रण विभाग आवश्यक असतो. हा विभाग ‘मूक’ रोबॉटातील सापेक्षतः साध्या प्रयुक्तीपासून ‘चलाख’ रोबॉटातील अतिशय जटिल आणि बदलत्या परिस्थितीशी सतत आंतरक्रिया करू शकण्याची क्षमता असलेल्या प्रणालीपर्यंत निरनिराळ्या स्वरूपांचा असू शकतो. या प्रणालीत विविध प्रकारचे संगणक, स्मृती माध्यमे (उदा., चुंबकीय फीत वा तबकडी), अनेक आदान /प्रदान द्वारे, निरपेक्ष व बदलते स्थान ओळखणारे सांकेतक, तत्काळ सुधारणा करण्याची संकेत पुनःप्रदान मंडलव्यूह आणि यांखेरीज आवश्यक असलेली सर्व स्विचे, परस्परजोड इलेक्ट्रॉनीय प्रयुक्तीचा व्यूह व तारजोडणी यांचा समावेश असू शकतो. सिकवण-लोलक, चावीफलक, ⇨ ऋण किरण नलिका आणि इतर प्रयुक्या (उदा., वाचा ओळखणाऱ्या व वाचा संश्लेषित करणाऱ्या) रोबॉटाच्या कार्यक्रमणाकरिता व त्याच्या कार्यमानावर लक्ष ठेवण्यासाठी आवश्यक असतात. यांखेरीज हाताळावयाच्या वस्तूंच्या बाह्यकारशी योग्य आंतरपुष्ठ साधण्यासाठी बाहूच्या अग्राशी अनुरूप अशी हत्यार योजना करावी लागते. पंजांचे अभिकल्प जसजसे मानवी हातांच्या क्षमतांशी तुल्य असे होत जातात, तसतशी त्यांची रचना अधिकाधिक जटिल होत जाते. याशिवाय त्यांच्यात संवेदकांचा अंतर्भाव केल्यास ते अधिकच जटिल, जड व जास्त खर्चिक होतात. रोबॉटांचे संवेदक त्यांना त्यांच्या स्थितीबद्दल (त्यांच्या दुव्यांच्या, अक्षांच्या व हत्यारांच्या अवकाशातील स्थितीबद्दल), सान्निध्याबद्दल (त्यांच्या जवळपास कोणत्या वस्तू आहेत वा त्यांच्या दिशांनी काही येत आहे की काय) आणि सभोवतालच्या परिस्थितीबद्दल (तापमानात, आर्द्रता, प्रकाशाची तीव्रता वगैरे) माहिती पुरवितात. रोबॉटामुळे माणसांना इतर उपकरण सामग्रीला, हत्यार योजनेला, उत्पादित करावयाच्या वस्तूला व त्याला स्वतःला हानी पोहचू नये, अशा प्रतिबंधात्मक सुरक्षा प्रयुक्या रोबॉटामध्ये व त्याच्या कक्षात असणे अत्यावश्यक आहे. भावी काळातील रोबॉटांना कार्यकक्षातील वस्तूंच्या स्थिती निर्धारित करण्यासाठी, सुरक्षिततेवर लक्ष ठेवण्यासाठी आणि त्रुटी ओळखण्यासाठी पूर्वस्थितीत येण्यासाठी संवेदकांचा अनिवार्यतेने अधिक प्रमाणात उपयोग करावा लागेल. रोबॉटांच्या येत्या पिढ्यांच्या बाबतीत यंत्र दृष्टी तंत्रविद्या (किंवा संगणक दृष्टी तंत्रविद्या म्हणजे त्रिमितीय जगातील दृश्य प्रतिमांतील माहिती मिळविण्यासाठी, तिचे विशेषीकरण व अर्थबोधन करण्यासाठी उपयोगात आणण्यात येणारी अंकीय संगणक तंत्रविद्या) महत्वाची ठरेल अशी अपेक्षा आहे.
रोबॉटाची शरीररचना : सर्व रोबॉटांत विशिष्ट मूलभूत विभाग असतात व काहींत अतिरीक्त क्षमता देण्यासाठी अधिक घटक असतात. सर्व रोबॉटांत शक्ती उद्गम (यांत्रिक, विद्युत्, विद्युत् यांत्रिक, वायवीय, द्रवीय किंवा यांचा संयोग असलेला) आणि त्याच्या हस्तक्रियाकारकाची (म्हणजे त्याच्या दुव्यांच्या जुळवणीची यालाच काही वेळा शरीर, खांदा बाहू व मनगट म्हणतात) हालचाल करण्यासाठी शक्तीचे प्रेषण करण्याचे साधन यांची आवश्यकता असते. शक्तीचे प्रेषण करण्याची दंतचक्रे, ⇨ कॅम, दंड, साखळ्या, चलित्रे, पंप वगैरे साधने वापरली जातात. काही रोबॉटांना अचल पाया असून त्याद्वारे हस्तक्रियाकारक जमीन, भिंत, खांब वा छत यांना जोडलेला असतो. काहींना चाके, साखळीपट्टे, रूळ वा ‘पाय’ यांसारखे गतिसाहाय्यक घटक असतात. सर्व रोबॉटांत नियंत्रण विभाग आवश्यक असतो. हा विभाग ‘मूक’ रोबॉटातील सापेक्षतः साध्या प्रयुक्तीपासून ‘चलाख’ रोबॉटातील अतिशय जटिल आणि बदलत्या परिस्थितीशी सतत आंतरक्रिया करू शकण्याची क्षमता असलेल्या प्रणालीपर्यंत निरनिराळ्या स्वरूपांचा असू शकतो. या प्रणालीत विविध प्रकारचे संगणक, स्मृती माध्यमे (उदा., चुंबकीय फीत वा तबकडी), अनेक आदान /प्रदान द्वारे, निरपेक्ष व बदलते स्थान ओळखणारे सांकेतक, तत्काळ सुधारणा करण्याची संकेत पुनःप्रदान मंडलव्यूह आणि यांखेरीज आवश्यक असलेली सर्व स्विचे, परस्परजोड इलेक्ट्रॉनीय प्रयुक्तीचा व्यूह व तारजोडणी यांचा समावेश असू शकतो. सिकवण-लोलक, चावीफलक, ⇨ ऋण किरण नलिका आणि इतर प्रयुक्या (उदा., वाचा ओळखणाऱ्या व वाचा संश्लेषित करणाऱ्या) रोबॉटाच्या कार्यक्रमणाकरिता व त्याच्या कार्यमानावर लक्ष ठेवण्यासाठी आवश्यक असतात. यांखेरीज हाताळावयाच्या वस्तूंच्या बाह्यकारशी योग्य आंतरपुष्ठ साधण्यासाठी बाहूच्या अग्राशी अनुरूप अशी हत्यार योजना करावी लागते. पंजांचे अभिकल्प जसजसे मानवी हातांच्या क्षमतांशी तुल्य असे होत जातात, तसतशी त्यांची रचना अधिकाधिक जटिल होत जाते. याशिवाय त्यांच्यात संवेदकांचा अंतर्भाव केल्यास ते अधिकच जटिल, जड व जास्त खर्चिक होतात. रोबॉटांचे संवेदक त्यांना त्यांच्या स्थितीबद्दल (त्यांच्या दुव्यांच्या, अक्षांच्या व हत्यारांच्या अवकाशातील स्थितीबद्दल), सान्निध्याबद्दल (त्यांच्या जवळपास कोणत्या वस्तू आहेत वा त्यांच्या दिशांनी काही येत आहे की काय) आणि सभोवतालच्या परिस्थितीबद्दल (तापमानात, आर्द्रता, प्रकाशाची तीव्रता वगैरे) माहिती पुरवितात. रोबॉटामुळे माणसांना इतर उपकरण सामग्रीला, हत्यार योजनेला, उत्पादित करावयाच्या वस्तूला व त्याला स्वतःला हानी पोहचू नये, अशा प्रतिबंधात्मक सुरक्षा प्रयुक्या रोबॉटामध्ये व त्याच्या कक्षात असणे अत्यावश्यक आहे. भावी काळातील रोबॉटांना कार्यकक्षातील वस्तूंच्या स्थिती निर्धारित करण्यासाठी, सुरक्षिततेवर लक्ष ठेवण्यासाठी आणि त्रुटी ओळखण्यासाठी पूर्वस्थितीत येण्यासाठी संवेदकांचा अनिवार्यतेने अधिक प्रमाणात उपयोग करावा लागेल. रोबॉटांच्या येत्या पिढ्यांच्या बाबतीत यंत्र दृष्टी तंत्रविद्या (किंवा संगणक दृष्टी तंत्रविद्या म्हणजे त्रिमितीय जगातील दृश्य प्रतिमांतील माहिती मिळविण्यासाठी, तिचे विशेषीकरण व अर्थबोधन करण्यासाठी उपयोगात आणण्यात येणारी अंकीय संगणक तंत्रविद्या) महत्वाची ठरेल अशी अपेक्षा आहे.
रोबॉटांचे विनिर्देश: रोबॉटांचे अभिकल्प पुष्कळ मोठ्या पल्ल्यांतील विनिर्देशांनुसार (आवश्यक वैशिष्ट्यांच्या परिमाणात्मक किंवा संख्यात्मक वर्णनानुसार) तयार केलेले असतात आणि त्यामुळे भावी उपयोग करणाऱ्याला त्याच्या गरजांनुसार रोबॉटांच्या वैशिष्ट्यांचा मेळ घालता येतो. विनिर्देशांसंबधिचे महत्वाचे भेद व व्याख्या खाली दिल्या आहेत.
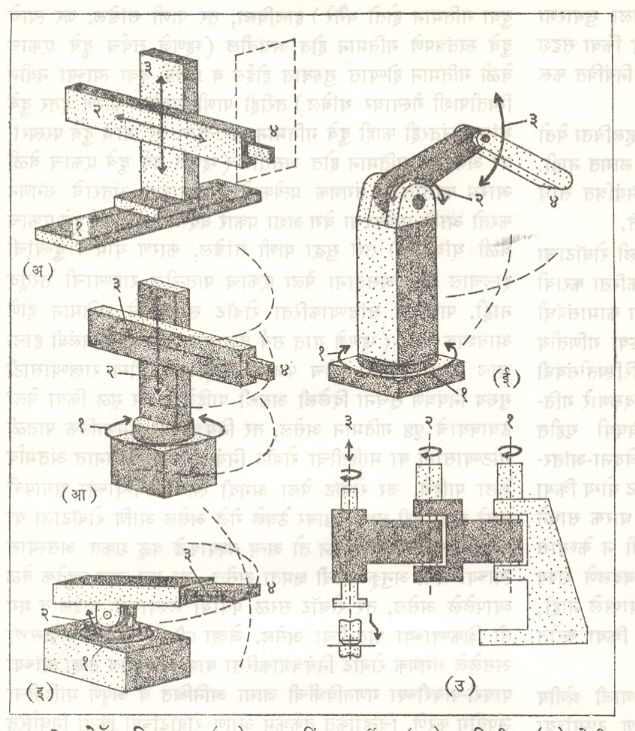
विन्यास : हस्तक्रियाकारकाचे पहिले तीन दुवे निरनिराळ्या प्रकारे जोडण्याचा व हालचाल करण्याच्या दृष्टीने अभिकल्पित करता येतात. या दुव्यांच्यामुळे पुढील विन्यास तयार होऊ शकतात : (१) जात्य (काटकोनी) किंवा कार्तीय विन्यास : यात तीन मूलभूत स्थानांतरणीय अक्षांत म्हणजे डावीकडून उजवीकडे, पुढे-मागे वा वर-खाली अशी गती शक्य असते. (२) वृत्तचितीय विन्यास : यात उभ्या अक्षाभोवती परिभ्रमी गतीही शक्य असते. त्यामुळे रोबॉटाच्या भोवतीच्या वृत्तचितीय क्षेत्रातील काम तो हाताळू शकतो. (३) गोलीय वा ध्रुवीय विन्यास : हा वृत्तचितीय विन्यासाशी सदृश आहे पण त्याची उभ्या दिशेतील गती खांद्याच्या सांध्याभोवती फिरण्यामुळे प्राप्त होते. (४) सांधेयुक्त बाहू किंवा बहिर्वलित विन्यास : यात खांदा, कोपर व मनगट या ठिकाणी सांधे असल्याने तो मानवी बाहूशी जास्त सदृश असतो. बाहूचे भाग या सांध्यांच्या बिंदूंभोवती फिरू शकत असल्याने त्याला निरनिराळ्या प्रतलांत गती मिळते.(५) स्कारा विन्यास : (SCARA : Selective Compliance Assembly Robot Arm). यातील सांधे आडव्या प्रतलात असल्याने बाहू पायाभोवती फिरू शकतो आणि घडीच्या आडोशीपटाप्रमाणे (स्क्रिनप्रमाणे) त्याची स्वतःवरच घडी होऊ शकते.
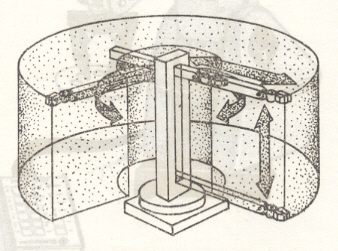
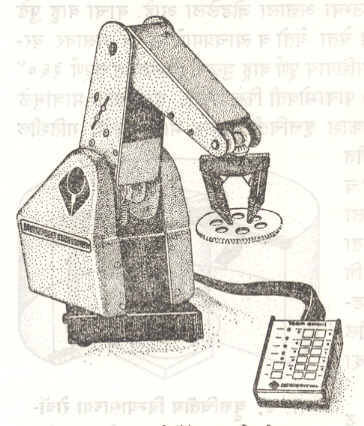
 कार्यावकाश किंवा कार्य अन्वालोप: प्रत्येक रोबॉटाचा प्रत्येक दिशेतील पोहोचण्याचा आवाका त्याच्या विन्यासावर, सांध्यांवर व त्याच्या घटकांच्या (दुवे व इतर घटकांच्या) आकारमानावर अवलंबून असतो. एखाद्या निश्चित केलेल्या बिंदूंच्या (उदा., मनगटाचा काठ, पंजाचा मध्य, हत्याराचे टोक) शक्य असलेल्या सर्व बाह्य (बाहू पूर्ण विस्तारित असतानाच्या) स्थितींतून अंतर्गत (बाहू पूर्ण संकोचित असतानाच्या) स्थिती वजा करून निर्माण होणाऱ्या घन भूमितीय अवकाशाला (किंवा आकाराला) रोबॉटाचा कार्यावकाश किंवा कार्य अन्वालोप म्हणतात. आ. ४ मध्ये वृत्तचितीय विन्यासाच्या रोबॉटाचा कार्यावकाश दाखविला आहे. या रोबॉटामध्ये आडवा अक्ष स्थिर पायावर बसविलेल्या उभ्या अक्षाला जोडलेला आहे. याचा बाहू पुढे जाऊ शकतो वा मागे घेता येतो व त्याचप्रमाणे उभ्या अक्षावर वरखाली होऊ शकतो. याशिवाय पूर्ण बाहू जुळणी (प्रत्यक्षात संपूर्ण ३६०० तून जरी नाही, तरी) पायाभोवती फिरू शकते. या मुक्तता मात्रांमुळे या रोबॉटाचा कार्यावकाश वृत्तचितीचा एक भाग बनतो. गतिशील रोबॉटांच्या बाबतीत कार्यावकाश खूपच विस्तारित असून त्याला रोबॉटाचे संभाव्यता कवच म्हणतात आणि त्यावर फक्त भौतिक अडथळे वा कार्यक्रमणावरील निर्बंध यांमुळे मर्यादा पडतात.
कार्यावकाश किंवा कार्य अन्वालोप: प्रत्येक रोबॉटाचा प्रत्येक दिशेतील पोहोचण्याचा आवाका त्याच्या विन्यासावर, सांध्यांवर व त्याच्या घटकांच्या (दुवे व इतर घटकांच्या) आकारमानावर अवलंबून असतो. एखाद्या निश्चित केलेल्या बिंदूंच्या (उदा., मनगटाचा काठ, पंजाचा मध्य, हत्याराचे टोक) शक्य असलेल्या सर्व बाह्य (बाहू पूर्ण विस्तारित असतानाच्या) स्थितींतून अंतर्गत (बाहू पूर्ण संकोचित असतानाच्या) स्थिती वजा करून निर्माण होणाऱ्या घन भूमितीय अवकाशाला (किंवा आकाराला) रोबॉटाचा कार्यावकाश किंवा कार्य अन्वालोप म्हणतात. आ. ४ मध्ये वृत्तचितीय विन्यासाच्या रोबॉटाचा कार्यावकाश दाखविला आहे. या रोबॉटामध्ये आडवा अक्ष स्थिर पायावर बसविलेल्या उभ्या अक्षाला जोडलेला आहे. याचा बाहू पुढे जाऊ शकतो वा मागे घेता येतो व त्याचप्रमाणे उभ्या अक्षावर वरखाली होऊ शकतो. याशिवाय पूर्ण बाहू जुळणी (प्रत्यक्षात संपूर्ण ३६०० तून जरी नाही, तरी) पायाभोवती फिरू शकते. या मुक्तता मात्रांमुळे या रोबॉटाचा कार्यावकाश वृत्तचितीचा एक भाग बनतो. गतिशील रोबॉटांच्या बाबतीत कार्यावकाश खूपच विस्तारित असून त्याला रोबॉटाचे संभाव्यता कवच म्हणतात आणि त्यावर फक्त भौतिक अडथळे वा कार्यक्रमणावरील निर्बंध यांमुळे मर्यादा पडतात.
 युक्तभार: रोबॉट जितके वजन अचूकपणे, काटेकोरपणे व खात्रीलायकपणे पुनःपुन्हा उचलण्याकरिता, हालविण्याकरिता व योग्य स्थितीत ठेवण्याकरिता अभिकल्पित केलेला असतो त्याला युक्तभार म्हणतात. अर्थात हे वजन रोबॉट वरील प्रत्येक गुण किती प्रमाणात साध्य करतो यावर तसेच ते हाताळताना हस्तक्रियाकारक पूर्णपणे विस्तारलेला आहे की आखडून घेतलेला आहे यावर अवलंबून असते.
युक्तभार: रोबॉट जितके वजन अचूकपणे, काटेकोरपणे व खात्रीलायकपणे पुनःपुन्हा उचलण्याकरिता, हालविण्याकरिता व योग्य स्थितीत ठेवण्याकरिता अभिकल्पित केलेला असतो त्याला युक्तभार म्हणतात. अर्थात हे वजन रोबॉट वरील प्रत्येक गुण किती प्रमाणात साध्य करतो यावर तसेच ते हाताळताना हस्तक्रियाकारक पूर्णपणे विस्तारलेला आहे की आखडून घेतलेला आहे यावर अवलंबून असते.
वेग : हा विनिर्देशही ज्या बिंदूकरिता (आखडलेल्या वा विस्तारलेल्या स्थितीत) व ज्या अंतराकरिता तो मोजलेला आहे त्यावर अवलंबून असतो. स्थिर स्थितीपासून रोबॉट प्रवेगित होणे (वेग वाढत जाणे), पूर्ण वेगात जाणे व थांबण्यापूर्वी प्रतिप्रवेगित होणे आवश्यक असते. जर हलविण्याचे अंतर कमी असेल, तर निर्धारित वेग मिळण्यास त्याला अवधी मिळणार नाही. यांखेरिज कित्येक कामांत भार नेमक्या स्थितीत ठेवणे आवश्यक असल्याने त्याकरिता रोबॉटाचा वेग कमी करणे जरूरीचे असते.
अचूकता : रोबॉटाची अचूकता म्हणजे त्याचा एखादा विशिष्ट बिंदू (सामान्यतः त्याच्या हाताचे वा हत्याराचे टोक) कोठे जातो व तो कोठे जाण्यासाठी कार्यक्रमण केलेले होते यांतील फरक होय.
पुनरावृत्तता: रोबॉटाची पुनरावृत्तता किंवा काटेकोरपणा म्हणजे त्याच्या हात वा हत्यार शिकविलेल्या स्थानी प्रत्येक वेळी येताना क्रमागत (लागोपाठच्या) स्थानांमध्ये पडणारा फरक होय.
विभेदकता: रोबॉटाला त्याच्या स्थितीमध्ये करता येणाऱ्या वा त्याच्या नियंत्रक प्रणालीला मोजता येणाऱ्या लहानात लहान वर्धिष्णू बदलाला त्याची विभेदकता म्हणतात.
विश्वसार्हता: कामाच्या सर्वसाधारण परिस्थितीत दिलेल्या अवधीकरिता योजिल्याप्रमाणे रोबॉटाने कार्य करण्याच्या संभाव्यतेच्या प्रमाणाला त्याची विश्वसार्हता म्हणतात.
रोबॉट नियंत्रण प्रणाली : रोबॉट यांत्रिक विन्यास व त्याचे आकारमान यांनुसार त्याच्या मुक्तता मात्रा व कार्यावकाशी परिमाणे ठरतात तर कार्यावकाशात तो ज्या मार्गानी जातो ते मार्ग त्याच्या नियंत्रण प्रणालीमुळे ठरतात.
रोबॉटाच्या गतिमार्गाचे अनेक प्रकारे वर्गीकरण करता येते. तो एका बिंदूपासून दुसऱ्या बिंदूकडे जाऊ शकतो (यात त्याची नियंत्रण प्रणाली तो अ या बिंदूपासून आ बिंदूकडे कोणत्या मार्गाने जात आहे हे लक्षात न घेता त्याला अ पासून आ कडे हालविते) किंवा अखंड मार्गावरून जाऊ शकतो (यात अ पासून आ पर्यतच्या गतिमार्गाचे नियंत्रण मार्गावरील ज्या बिंदूंतून रोबॉटाचे टोक जाते अशा बिंदूची स्थापना करून केले जाते). रोबॉटाच्या गतीमध्ये भेद करण्याच्या एका पद्धतीत त्याच्या प्रत्यक्ष गतिमार्गाची इष्ट वा आदर्श गतिमार्गाशी असणारी तद्रूपता लक्षात घेतली जाते. जर इष्ट मार्ग हा बिंदूंच्या मालिकेने बनलेला आहे असे समजले, तर रोबॉटाचा नियंत्रण एकेकट्या बिंदूच्या बाबतीत संगणन करून गती पूर्ण करू शकतो. तो भावी-प्रदान नियंत्रणाचा उपयोग करू शकतो किंवा संपूर्ण मार्गाची योजना करू शकतो.
रोबॉटाची नियंत्रण प्रणाली हा एक उपकरण-संच (सामान्यतः इलेक्ट्रॉनीय) असून तो यांत्रिक भागांच्या क्रियांचे दिग्दर्शन करतो. या संचात रोबॉट यंत्रणा निवडलेल्या बिंदूंच्या दरम्यान पुनरावृत्त आकृतिबंधात हालचाल करेल असा क्रियाचा क्रम नियुक्त करणारी प्रयुक्ती व यांत्रिक रोधांची मालिका यांचा समावेश असू शकतो पण अधिक सुविकसित प्रणालींत सांधे सेवा-प्रयुक्ती नियंत्रणाने योग्य स्थितीत नेण्यात येतात.
सेवा प्रणाली : या प्रणालींत सांध्याच्या प्रत्यक्ष स्थितीचे माप प्रकाशीय दंड सांकेतकासारख्या ⇨ उर्जापरिवर्तकाच्या साहाय्याने मिळवले जाते आणि त्याची सांध्याच्या विनिर्देशित स्थितीशी तुलना करून पाहिली जाते. जर इष्ट स्थिती व मोजलेली स्थिती यांत फरक असेल, तर विद्युत् मंडलव्यूहातून सांध्याच्या चलित्राला सुधारणा करणारा संकेत दिला जातो. अशी सेवा प्रणाली अंकीय किंवा सद्दश असू शकते आणि स्थितीबरोबरच ती सांध्याचा वेगही नियंत्रित करू शकते. [⟶ सेवा-यंत्रणा].
सेवा प्रयुक्तांमुळे निवडलेल्या स्थितिक्रमातून रोबॉट हलविता येतो व याकरिता यांत्रिक रोधांची अगोदर मांडणीही करावी लागत नाही. जर आज्ञांचा योग्य अनुक्रम निर्माण केला तर सेवा-नियंत्रित सांधे अखंड, सुरळीतपणे बदलणाऱ्या मार्गातून नेणे शक्य होतो.
संगणक नियंत्रणक : अधिक सुविकसित नियंत्रण प्रणाली रोबॉटाचा गतिमार्ग संगणकाद्वारे आपोआप निर्माण करतात. याकरिता करावी लागणारी संगणने ही प्रक्रिया करावयाच्या वस्तूसंबंधी वा कामासंबंधी संगणकाच्या प्रदत्त-संग्रहात (माहिती-संग्रहात) असलेल्या गणितीय वर्णनाच्या आधारे करण्यात येतात. सभोवतालच्या परिस्थितीसंबंधी रोबॉटाच्या संवेदना प्रणालीने दिलेल्या माहितीनुसार बदलणारे गतीमार्गही संगणक निर्माण करू शकतात. परिस्थितीविषयी गृहीत धरलेल्या काही गोष्टींवर अवलंबून राहण्यापेक्षा या संवेदना-आंतरक्रियाशील प्रकारच्या नियंत्रणामुळे परिस्थितीनुसार रोबॉट योग्य क्रिया करू शकतो. उदा., वस्तू धरून ठेवणयासाठी महाग धारक साधने उपलब्ध नसल्यास व कामाच्या वेळेची योग्य आखणी न केल्यास प्रक्रिया करावयाच्या भागाचे प्रत्यक्ष स्थान क्षणोक्षणी बदलणे शक्य आहे या बाबतीत संवेदना-आंतरक्रियाशील नियंत्रण वापरले नाही, तर रोबॉट पूर्वकार्यक्रमणानुसार पण चुकीच्या स्थितीत क्रिया करीत राहील.
श्रेणीय नियंत्रण : सर्वांत प्रगत रोबॉट नियंत्रण प्रणाली श्रेणीय नियंत्रणाचा अवलंब करतात. अशा प्रणालीत नियंत्रण टप्प्यांच्या श्रेणीतील प्रत्येक पातळी तिच्या वरच्या पातळीकडून कोणते उद्दिष्ट गाठावयाचे आहे याचे निवेदन स्वीकारते. या उद्दिष्टांची जटिलता पातळीच्या श्रेणीतील स्थानावर अवलंबून असते. सर्वांत खालची पातळी सांध्याच्या स्थितीच्या सेवा-चलित्राची असते व तीत आज्ञेनुसार त्या सांध्याची पुढील स्थिती एवढेच उद्दिष्ट असते. प्रत्येक उच्चतर पातळी स्वतःचे चालू उद्दिष्ट गाठण्यासाठी तिच्या खालील पातळीला आज्ञाक्रम (उपउद्दिष्ट्ये) देते. ही उपउद्दिष्टे निवडताना प्रत्येक पातळी स्वतःचे चालू उद्दिष्ट, तिच्या संवेदना-आदानानुसार असणारी बाह्य परिस्थितीची चालू अवस्था व खालच्या पातळीची चालू अवस्था हे सर्व जमेस धरते. अशा प्रकारे श्रेणीची प्रत्येक पातळी पुढील खालच्या पातळीच्या क्रियांवर सेवा-नियंत्रक म्हणून कार्य करते आणि स्वतःच्या उद्दिष्टानुसार निश्चित केलेल्या घटनांच्या अवस्था व चालू घटनांच्या अवस्था यांतील फरक कमी करण्याच्या दृष्टीने खालच्या पातळीला आज्ञा देते. अशा प्रणाली संवेदना-आंतरक्रियाशील असून मानवी तंत्रिका तंत्रातील (मज्जासंस्थेतील) अनेक कार्यांसारखी नियुक्त-कार्य पृथक्करण करणारी श्रेणीय रचना त्यांत अंतर्भूत असते. या प्रणालींमुळे उच्चतम पातळीवर उद्दिष्ट निश्चित करणाऱ्या अगदी सर्वसाधारण आज्ञांद्वारे रोबॉटाला सूचना देता येतात.
समन्वय : रोबॉटाच्या गतीच्या नियंत्रणाच्या निरनिराळ्या पातळ्यांत भेद करण्याची एक पद्धत म्हणजे त्यांचे भाग गतिमान असताना त्यांच्यात होणाऱ्या समन्वयाचे प्रमाण लक्षात घेणे, ही होय. यांकरिता सांधेयुक्त बाहू असलेल्या व पाण्याने काठोकाठ भरलेला पेला पाणी न सांडता एका पृष्ठावरून निराळ्या उंचीवर असलेल्या दुसऱ्या पृष्ठावर ठेवण्याचे काम सोपविलेल्या रोबॉटाचे उदाहरण घेऊ. जर त्याने पेला अनुक्रमाने (म्हणजे एक दुवा गतिमान होण्यास प्रारंभ करतो, नवीन स्थितीत जातो, तेथे थांबतो, मग पुढचा दुवा गतिमान होतो वगैरे) हालविला, तर पाणी सांडेल. जर त्याचे दुवे स्वतंत्रपणे गतिमान होत असतील (म्हणजे सर्वच दुवे एकाच वेळी गतिमान होण्यास सुरुवात होईल व प्रत्येक दुवा त्याच्या नवीन स्थितीपाशी गेल्यावर थांबेल) तरीही पाणी सांडेल कारण इतर दुवे थांबल्यानंतरही काही दुवे गतिमान राहातील. जर त्याचे दुवे परस्परांवर अवलंबून गतीमान होत असतील (म्हणजे सर्व दुवे एकाच वेळी आरंभ करतात व संगणक प्रत्येकाने हालण्याच्या अंतराचे संगणन करतो आणि प्रत्येकाचा वेग अशा प्रकारे बदलतो की, सर्व दुवे एकाच वेळी थांबतील) तरी सुद्धा पाणी सांडेल, कारण यामध्ये दुव्यांची हालचाल होत असताना पेला एकाच पातळीत राहण्याची तरतूद नाही. पाणी न सांडण्याकरिता रोबॉट समन्वयाने गतिमान होणे आवश्यक आहे (म्हणजे यात सर्व वेळ दुव्यांची परस्परावलंबी हालचाल झाली पाहिजे, तसेच पंजाची दिक्स्थिती योग्य राखण्यासाठी मुख्य नियंत्रण सूचना दिलेली असली पाहिजे). जर मूळ किंवा पेला ठेवावयाचे पृष्ठ गतिमान असेल, तर नियंत्रणाची समकालिक पातळी गाठण्यासाठी या माहितीचा रोबॉट नियंत्रकाच्या संगणनात अंतर्भाव केला पाहिजे. जर रोबॉट पेला अगदी खाली ठेवण्याच्या क्षणापूर्वी दुसरे काही तरी लक्ष्य पृष्ठावर ठेवले गेले असेल आणि रोबॉटाला या परिस्थितीची जाणीव होऊन तो अन्य लक्ष्याकडे वळू शकत असल्यास त्याच्या अंगी अनुकूलनाची क्षमता असेल. जर मूळ लक्ष्य बहुतेक वेळ व्यापलेले असेल, तर रोबॉट सरळ पर्यायी लक्ष्याकडे जाईल व मग तो शिकण्याच्या पातळीचा असेल. जेव्हा ⇨ संश्लेषित बुद्धिमत्ता असलेले संगणक रोबॉट नियंत्रणाकरीता वापरले जातील तेव्हा त्यांच्या पायरी-पायरीच्या गणनविधींची जागा अनिश्चित व अपूर्व माहितीचा उपयोग करणे, चिन्हांकित तर्कक्रम आणि रोबॉटांच्या क्रिया निर्धारित करण्याची समज या अधिक मानवसदृश क्षमता घेतील.
 रोबॉटांचे कार्यक्रमण : रोबॉटातील यांत्रिक भाग जसजसे प्रगत होत गेले, तसतशी त्यांचे कार्यक्रमण करण्याच्या पद्धती, त्याकरीता वापरण्यात येणाऱ्या भाषांची संख्या व त्या भाषांचे स्तर या सर्वांतवाढ होत गेली. प्रारंभीचे सर्व रोबॉट ‘शिकवणे व पुनरावृत्ती करणे’ या प्रकारचे होते. म्हणजे त्यांचे कार्यक्रमण स्थितिक स्वरूपाचे होते आणि ते एकदा स्मृती माध्यमात नोंदविल्यावर त्याप्रमाणे त्याचे पुनरुत्पादन करणे फक्त शक्य होई. आता प्रचलित असलेल्या रोबॉटांचे कार्यक्रमण गतिक असून रोबॉट कार्य करीत असताना त्यात बदल करणे शक्य असते.
रोबॉटांचे कार्यक्रमण : रोबॉटातील यांत्रिक भाग जसजसे प्रगत होत गेले, तसतशी त्यांचे कार्यक्रमण करण्याच्या पद्धती, त्याकरीता वापरण्यात येणाऱ्या भाषांची संख्या व त्या भाषांचे स्तर या सर्वांतवाढ होत गेली. प्रारंभीचे सर्व रोबॉट ‘शिकवणे व पुनरावृत्ती करणे’ या प्रकारचे होते. म्हणजे त्यांचे कार्यक्रमण स्थितिक स्वरूपाचे होते आणि ते एकदा स्मृती माध्यमात नोंदविल्यावर त्याप्रमाणे त्याचे पुनरुत्पादन करणे फक्त शक्य होई. आता प्रचलित असलेल्या रोबॉटांचे कार्यक्रमण गतिक असून रोबॉट कार्य करीत असताना त्यात बदल करणे शक्य असते.
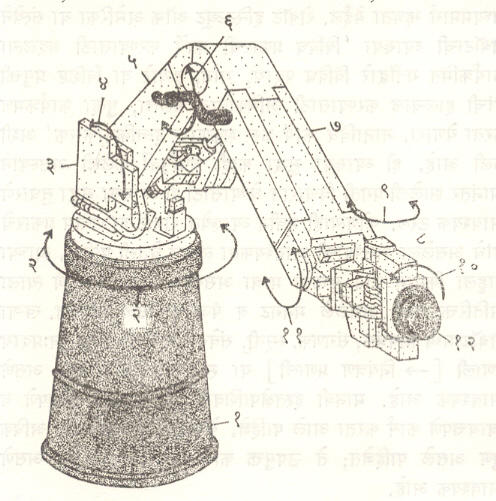
रोबॉट कार्यक्रमणांची निर्मिती अंत्य रोध, स्विचे, खिट्या,कॅम, तारा वगैरे फिरत्या दंडगोलावर, तात्पुरती मंडल जोडणी करणाऱ्या फलकांवर वा नियंत्रण फलकांवर बसवून अथवा बटणे, स्विचे व नियंत्रक दांडी बसविलेल्या व रोबॉटाला लवचिक केबलीने जोडलेल्या शिकवण-लोलकाचा (आ. ५) उपयोग करून किंवा रोबॉटाचे योग्य टोक मनुष्याने प्रत्यक्ष धरून ते इष्ट स्थितीमधून फिरवून किंवा चावीफलकाच्या पाठ्यभाषेत सूचना व प्रदत्त टंकीत करण्यासाठी उपयोग करून करता येते. शेवटच्या खेरीज करून बाकी सर्व पद्धतींच्या बाबतीत मार्गानुसारी कार्यक्रमणच करता येते व त्यांत कार्यक्रमण प्रयुक्ती रोबॉटाला जोडावी लागते. चावीफलक पद्धतीच्या बाबतीत मार्गानुसारी वा मार्गबाह्य कार्यक्रमण करता येते व त्यात प्रयुक्ती रोबॉटाला जोडलेली नसते. मार्गबाह्य कार्यक्रमणाचा फायदा असा की, रोबॉट एक काम करित असतानाचा दुसऱ्या कामासंबंधीचा अभिकल्प, कार्यक्रमण, विश्लेषण, सदृशीकरण व त्रुटी निराकारण या गोष्टी रोबॉटाचा उत्पादन काल वाया न घालविता करता येतात.
कार्यक्रमणाच्या मूलभूत भाषांपासून बनलेले भिन्न प्रकार लक्षात घेता रोबॉट कार्यक्रमणाच्या सु. २० भाषा असून अद्यापही त्यांच्या संख्येत भर पडत आहे. याचे कारण म्हणजे अनेक रोबॉट उत्पादकांना असे वाटते की, अन्य उत्पादकाने वापरलेल्या भाषेपेक्षा स्वतःच्या रोबॉटाकरिता खास भाषा विकसित करणे इष्ट आहे. याकरिता मानके विकसित केली पाहिजेत व ती स्विकारली गेली पाहिजेत म्हणजे त्यामुळे सर्व रोबॉट भाषा व कार्यक्रम सार्वत्रिक, सुटसुटीत, स्वयंघटकी व लवचिक होतील. याखेरीज सध्या वापरात असलेल्या बहुतेक रोबॉट कार्यक्रमण भाषा सुव्यक्त आहेत म्हणजे त्यांतील सूचना रोबॉटाला सरळ क्रिया करण्याच्या आज्ञेच्या (उदा., ‘पंजा उघड’, ‘उजवीकडे वळ’ वगैरे) स्वरूपाच्या असतात. भावी काळातील रोबॉटाला वाणी द्वारे किंवा आदान/प्रदानाद्वारे सुचना (अथवा कार्यक्रमण आज्ञा) दिल्या जाण्याची शक्यता आहे. म्हणून त्यांना संश्लेषित बुद्धिमत्ता असणे आवश्यक होईल आणि तीमुळे त्यांना आज्ञांचे योग्य अर्थबोधन करणे व त्या अमलात आणणे शक्य होईल. या आज्ञा अतिशय उच्च-स्तरीय भाषेत व्यक्त केल्या जातील. सध्याच्या कार्यक्रमण भाषांत तपशीलवार सूचना अचूक वाक्यरचना करून द्याव्या लागतात, तर भावी काळातील भाषा मांडणीच्या बाबतीत कमी काटेकोर असतील व त्यांतील आज्ञा अधिक कार्यभिमुख असतील म्हणजे कार्यक्रमण करणारा ‘३० ब’ नमुन्याच्या रेडिओ संचाची ‘जुळणी कर’ यासारखी आज्ञा देईल व हे काम करण्यासाठी रोबॉटला आपली स्वतःची टप्प्यामागून टप्पा अशी प्रक्रिया विकसित करावी लागेल. अशा प्रकारे कार्यक्रमण करण्यासाठी रोबॉटापाशी उच्च पातळीची बुद्धिमत्ता असणे आवश्यक होईल. उच्च-स्तरीय रोबॉट कार्यक्रमण भाषा विकसित करण्याचे कार्य कित्येक विद्यापीठे, रोबॉट उत्पादक व काही देशांची शासने करीत आहेत. या भाषा तसेच तोंडी आज्ञा व अनेक विविध संवेदकांपासून मिळणारे संकेत यांच्या संयोगाने परिणामकारकपणे सुरक्षितपणे कार्य करू शकणारे रोबॉट निर्माण करण्यात येतील.
रोबॉटाचे अनुप्रयोग : रोबॉट एकएकटे किंवा एखाद्या प्रणालीचे घटक म्हणून वापरता येतात. ते औद्योगिक, व्यापारी, वैद्यकीय, कृषी, लष्करी, शैक्षणिक, गृह, छंद व इतर विविध हेतूंकरिता वापरता येतात. त्यांच्यातील पुष्कळ मुक्तता मात्रा, बाहूच्या टोकाला अदलाबदल करण्यायोग्य विविध हत्यारयोजना वापरण्याची सोय व पुनःकार्यक्रमणशीलता या गुणांमुळे त्यांना जवळजवळ सर्वकामी यंत्रे असे म्हणता येईल आणि त्यांच्या संभाव्य उपयुक्ततेची कक्षा अतिशय व्यापक आहे. तथापि त्यांच्या अलीकडील विकासाचा मुख्य भर औद्योगिक अनुप्रयोगांवरच आहे व इतर अनुप्रयोगांची नुकतीच सुरुवात झालेली आहे.
बहुतांश रोबॉट आ. २ मध्ये दाखविल्याप्रमाणे सहा अक्ष व सांधेयुक्त बाहू असलेल्या प्रकारचे आहेत. तथापि रोबॉटांच्या या मूलभूत प्रकारचे विविध आकारांत, आकारमानांत व निरनिराळ्या क्षमता असलेल्या रूपांत उत्पादन करण्यात आलेले असून या क्षमतांचा बहुविध कामांसाठी उपयोग करून घेण्यात आलेला आहे.
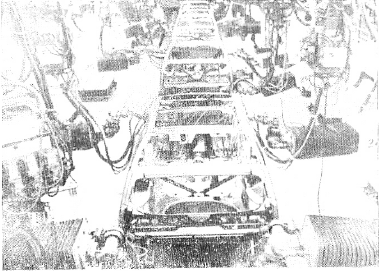
रोबॉटांच्या उपयोगाला प्रारंभी चालना अवजड, पुनरावृत्त कामाकरिता मनुष्याच्या जागी उपयोग करण्याचा आणि ठराविक कार्य करणाऱ्या यंत्रसामग्रीच्या जागी अधिक लवचिक व पुनःकार्यक्रमणशील उपकरण संचाचा वापर करण्याच्या दृष्टिकोनामुळे मिळाली. प्रारंभीच्या मर्यादित संवेदनाक्षमतांमुळे रोबॉटांची उपयुक्तता स्पष्ट ठराविक गतिमार्ग असलेल्या कामांकरिताच होती. यामुळे रोबॉटाचे सुरुवातीचे उपयोग तबके व वाहक साधने यांच्यावरून वा यांच्याकडे भाग उचलण्या-नेण्यासाठी, स्वयंचलित यंत्रसामग्रीत (उदा., दाबयंत्रे, लेथ, ओतकाम यंत्रे), माल चढविणे व उतरविणे आणि जुळणी मार्गावरून जात असलेल्या वस्तूंचे वितळजोडकाम व फवारा रंगकाम यांसारख्या कामांमध्ये करण्यात आले. हे उपयोग अगोदर करण्यात आल्याने रोबॉट क्षेत्रात संख्यात्मक दृष्ट्या त्यांचेच वर्चस्व जास्त आहे. १९८५ च्या सुमारास अमेरिकेत औद्योगिक रोबॉटांचा सर्वांत जास्त प्रचलित असलेला उपयोग मोटारगाड्यांच्या साट्यांचे बिंदू वितळजोडकाम हाच होता.
या कामांकरिता वापरण्यात येणारे रोबॉट कित्येक किग्रॅ. वजन उचलण्याच्या क्षमतेच्या लहान नमुन्यांपासून कित्येक हजारो किग्रॅ. उचलण्याची क्षमता असलेल्या खूप मोठ्या प्रकारांपर्यंत असतात. उचलण्याच्या व ठेवण्याच्या कित्येक कामांत सहापेक्षा कमी मुक्तता मात्रांची गरज असते आणि अनेक औद्योगिक रोबॉटांच्या मुक्तता मात्रा तीन, चार वा पाच असतात. कार्यावकाशाचे आकार व आकारमान यांनुसारही रोबॉटांचे अभिकल्प वेगवेगळे असतात. उदा., अनेक रोबॉट स्वतःभोवतील पूर्ण वर्तुळात पोहचू शकतील, अशा प्रकारे अभिकल्पित केलेले असतात. कारण यामुळे त्यांना एकाच वेळी अनेक यंत्रांची निगा ठेवून उच्च उत्पादनक्षमता साध्य करता येते.
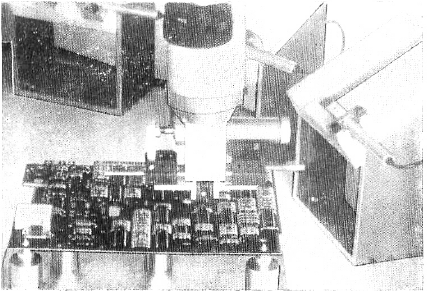
रोबॉटविज्ञानातील नंतरच्या विकासामुळे औद्योगिक अनुप्रयोगांत रोबॉटाच्या वेगाचा व अचूकतेचा उपयोग छिद्रण व इतर हलक्या यंत्रणक्रिया, चिकटविणे व जोडणे, साधी जुळणी, आवेष्टन व मुद्रांकन आणि परीक्षण व मापन यांसारख्या कामांसाठी करून घेण्यात आला. या कामांकरिता विकसित केलेल्या रोबॉटांची पुनरावृत्तता २५ मायक्रोमीटर (१ मायक्रोमीटर = १०– ६ मी.) यापेक्षा चांगली असू शकते व त्याच वेळी एका स्थितीपासून दुसऱ्या स्थितीकडे होणारी त्यांची हालचाल उच्च वेगाने होऊ शकते. या रोबॉटांना बऱ्याचदा अतिविशेषीकृत व बदलता येणारी अंत्यसाधने जाडलेली असतात. या प्रकारचे रोबॉट बहुदा अखंड मार्ग प्रकारचे असतात कारण त्यांना बऱ्याचदा जटिल गतिमार्गातून जावे लागते. त्यांच्या नियंत्रण प्रणाली संवेदनाक्षमतायुक्त असतात. या प्रकारचे रोबॉट मुद्रित विद्युत् मंडलाच्या फलकावरील [⟶ मुद्रित मंडले] घटक बसविण्याच्या खुणा दृक् संवेदनेने जाणून दोन घटकांमधील अंतर अतिशय अल्प असूनही फलकावर घटक अचूकपणे बसवू शकतात.
जुळणीकाम : रोबॉटांच्या अधिक सुविकसित संवेदनाक्षमता विकसित झाल्यावर उदयास आलेल्या रोबॉट अनुप्रयोगांत जटिल जुळणीची कामे प्रमुख आहेत. अशा रोबॉटांना जटिल त्रिमितीय भाग शोधणे व बसविणे, हे भाग उच्च मापसुटीला [⟶ जुळणी व मापसूट] योग्य अशा जोडीचे जुळविणे आणि मग विविध जटिल जोडणीक्रिया (उदा., बोल्ट फिरवून बसविणे) करणे अशी कामे करता आली पाहिजेत. जुळणीकामाकरिता वापरण्यात येणाऱ्या रोबॉट हस्तक्रियाकारकांना बहुधा सहापेक्षा जास्त मुक्तता मात्रा असतात. यामुळे ते दिलेल्या स्थानी व दिक्स्थितीत एकापेक्षा अधिक मार्गानी (उदा., अडथळा करणाऱ्या भागावर आदळण्याचे टाळून) पोहोचू शकतात.
या रोबॉटांत कोणत्या तरी प्रकारच्या प्रेरणापरिपीडन (पीळ) संवेदकाचा वा स्पर्श संवेदकाचा अंतर्भाव केलेला असतो. भाग योग्य स्थितीत बसविताना व त्यांच्या जोड्या जुळविताना ते घट्ट बसतील व चिकटतील असा प्रेरणा निर्माण होणे शक्य असते आणि रोबॉटाला या प्रेरणा जाणणे व त्यांना अनुरूप असा प्रतिसाद देणे या संवेदकांमुळे शक्य होते. जुळणीकाम म्हणजे सामान्यतः कार्यावकाशात विविध भाग आहेत असे अभिप्रेत असल्याने जुळणीकरिता भाग ओळखणे व शोधणे या क्रिया करणे शक्य होण्यासाठी अशा रोबॉटांत बहुधा दृष्टीचा समावेश करण्यात येतो. जुळणीकामासाठी लागणाऱ्या दृक् क्षमता साध्यापासून ते जटिलापर्यंत असू शकतात. कित्येक बाबतीत भागांच्या फक्त थोड्याच विरामी स्थिर स्थिती असू शकतात आणि त्यांच्या द्विमितीय रूपरेषा ओळखणे व शोधणे हे ते भाग मिळविण्यास व योग्य दिक्स्थितीत ठेवण्यास (विशेषतः हे भाग अलग अलग असतील तर) पुरेसे असते. सर्वांत जटिल काम म्हणजे एखाद्या कप्प्यातील सरमिसळ असलेल्या भागांतून योग्य भाग निवडून काढणे हे असून व्यापारी रोबॉटांत ही क्षमता अद्याप आढळत नाही.
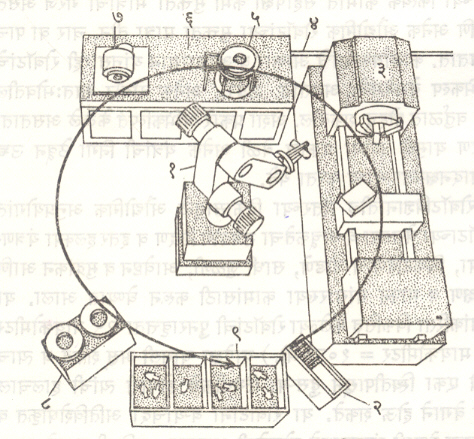 रोबॉट कार्यकक्ष : रोबॉट कार्यकक्षात एक वा अनेक रोबॉटांचे रूढ यंत्राबरोबर आंतरपृष्ठ (सहभागाची सीमा) बनते आणि त्याद्वारे वस्तू कक्षात आणणे, योग्य स्थानी धरून ठेवणे व कक्षातून बाहेर नेणे ही कार्ये रोबॉट करतात. यांखेरीज रोबॉट कार्यकक्षात संगणनाची वा नियंत्रणाची क्षमता असलेला घटक, विविध संवेदकांचा संच, अंतर्बंधक (धोक्याच्या वेळी एखादी यंत्रसामग्री क्रियाशील होण्यास प्रतिबंध करणारी) स्विचे, विद्युत् मंडल व्यूह व शक्ती पुरवठा जोडणी तसेच ‘इजा’ पोहचू नये म्हणून ‘अतिबिकटप्रसंगा’च्या सदृशीकरणावर आधारलेली सुरक्षा उपाययोजना यांचा अंतर्भाव असतो.
रोबॉट कार्यकक्ष : रोबॉट कार्यकक्षात एक वा अनेक रोबॉटांचे रूढ यंत्राबरोबर आंतरपृष्ठ (सहभागाची सीमा) बनते आणि त्याद्वारे वस्तू कक्षात आणणे, योग्य स्थानी धरून ठेवणे व कक्षातून बाहेर नेणे ही कार्ये रोबॉट करतात. यांखेरीज रोबॉट कार्यकक्षात संगणनाची वा नियंत्रणाची क्षमता असलेला घटक, विविध संवेदकांचा संच, अंतर्बंधक (धोक्याच्या वेळी एखादी यंत्रसामग्री क्रियाशील होण्यास प्रतिबंध करणारी) स्विचे, विद्युत् मंडल व्यूह व शक्ती पुरवठा जोडणी तसेच ‘इजा’ पोहचू नये म्हणून ‘अतिबिकटप्रसंगा’च्या सदृशीकरणावर आधारलेली सुरक्षा उपाययोजना यांचा अंतर्भाव असतो.
चल रोबॉट : काम करीत असताना पूर्णपणे स्वतःला हालविण्याची गती ज्या रोबॉटांना निर्माण करता येते, त्यांना चल रोबॉट म्हणतात. साधे चल रोबॉट कारखान्यात मालाची हालवाहालव करण्यासाठी, कार्यालयाच्या इमारतीतच टपाल पोहोचविण्यासाठी आणि मार्गाची कुशल निवड व अडथळे टाळण्याची मर्यदित क्षमता असलेल्या यांसारख्या कामांसाठी बऱ्याच काळ वापरात आहेत. घरांमध्ये वापरावयाचे चल रोबॉट उपलब्ध आहेत पण अद्याप नावीन्य व करमणूक यापेक्षा त्यांना अधिक कार्य नाही. रोबॉट नियंत्रण व संवेदना यांतील विकासाबरोबरच रोबॉट चलनवलनाच्या यंत्रणांतील प्रगती लक्षात घेता चल रोबॉटांच्या अनुप्रयोगांच्या क्षेत्राची लक्षणीय वाढ होण्याची शक्यता आहे. या अनुप्रयोगांत बँक, दुकाने व घरे अशा ठिकाणी रखवालीचे काम आणि व्यापारी व घरगुती स्तरावरील सफाई यांचा समावेश आहे. परिचारिकेचा मदतनीस, अपंगाचा सहाय्यक, हिरवळीचे गवत कापणे यांसारखी कामेही ते करू शकतील. कृषी (पिकांची लावणी कीटकनाशके, तणनाशके व खते पसरणे कापलेले पीक गोळा करणे, दर्जा ठरविणे, वर्गीकरण करणे व भरणे, अंडी गोळा करणे, गुरांना खाऊ घालणे, गाईचे दूध काढणे, मेंढ्यांची लोकर कापणे, लाकूड कापणे व वाहून नेणे वगैरे), बांधकाम, खाणकाम, आग निवारण, बचावकार्य, धोकादायक पदार्थाची हाताळणी, सागरी पृष्ठाखालील समन्वेषण, अणुशक्ती उत्पादन केंद्रातील धोकादायक कामे, अवकाशयानातील व त्याबाहेरील विविध कामे यांसारख्या कामांसाठी उपयोगी पडतील अशा रोबॉटांसंबंधीचे संशोधन व विकास कार्य निरनिराळ्या देशांत चालू आहे.
चल रोबॉटासंबंधीची एक प्रमुख समस्या म्हणजे भाकित न करता येणाऱ्या बदलत्या परिस्थितील मागनिर्देशनामुळे वाढलेली संवेदनाक्षमतेची गरज, ही होय. या कारणांमुळे बहुतेक घराबाहेरील उपयोगांसाठी खऱ्या अर्थाने स्वायत्त असलेला चल रोबॉट अद्याप प्रत्याक्षात येण्याच्या टप्प्यात नाही. तथापि कित्येक अनुप्रयोगांत अर्धस्वायत्तरोबॉटाचा उपयोग करणे फायदेशीर ठरेल. या संदर्भात रोबॉट जहाजे ही संकल्पना लक्षवेधी असून तीत या जहाजांत जहाज चालविण्यातील सर्वसाधारण समस्या सोडविण्याची क्षमता असेल पण नाविक कर्मचारी असलेल्या अग्रभागी जहाजाच्या मागून जाणाऱ्या समुहाच्या स्वरूपात या जहाजांचा उपयोग करण्यात येईल. जमिनीवरील वाहनांच्या बाबतीतही यांसारख्या संकल्पनांचा विचार करण्यात आलेला आहे.
स्वयं-उत्पादक प्रणाली : औद्योगिक रोबॉट हा एकूण रोबॉट प्रणालीचा फक्त एक घटक असतो आणि ही प्रणाली एकूण स्वयं-उत्पादक प्रणालीचा फक्त एक भाग असते. या स्वयं-उत्पादक प्रणालीत रोबॉट वा इतर स्वयंचलित साधनांनी करावयाची हाताळणी सामावू शकेल असा सुटे भाग उत्पादन करावयाची वस्तु-प्रक्रिया यांचा योग्य अभिकल्प, संगणक-साहाय्यित अभिकल्प, समाईक प्रदत्त-संग्रह, माल हाताळणारी स्वयंचलित प्रणाली आणि तत्काल पुनःप्रदाय, सुधारणा व नियंत्रण या मार्गाने काम करणारी एकात्म, समतोल प्रणाली उभारणारे विविध कार्यकक्ष व कर्मचारी यांना जोडणारे माहिती-जाळे या सर्वांचा अंतर्भाव होतो.
रोबॉट कारखाना : रोबॉटविज्ञानाच्या सर्वांत जटिल अनुप्रयोगांपैकी रोबॉट कारखाना हा एक आहे. हा कारखाना म्हणजे रोबॉटांचा किंवा अगदी मानवी कामगारांऐवजी केवळ रोबॉटांचाच वापर करण्यात येणारा असा कारखाना नसून हा कारखाना म्हणजे स्वतःच एक रोबॉट आहे. म्हणजे तो उत्पादन यंत्रे, रोबॉट हस्तक्रियाकारक, माल हाताळणी प्रणाली आणि इतर प्रयुक्त्या यांचा समूह असून या सर्वांना स्वतःची स्थानिक बुद्धिमत्ता आहे परंतु ते सर्व एका मध्यवर्ती नियंत्रण प्रणालीला जोडलेले आहेत आणि तीद्वारे त्यांचा समन्वय व संघटन करण्यात येते. ही मध्यवर्ती नियंत्रण प्रणाली सर्व क्रियांची योजना व अनूसूची ठरविते आणि आपली उद्दिष्टे साध्य करण्यासाठी साधनसामग्रीचा जरूरीनुसार योग्य प्रकारे उपयोग करते. काही व्यापारी उत्पादन प्रणाली अद्याप स्वयंपूर्ण नसल्या, तरी या दिशेने जाण्याच्या स्थितीत आहेत. काही प्रयोगिक रोबॉट कारखाना प्रणाली (उदा., अमेरिकेच्या नॅशनल ब्यूरो ऑफ स्टँडर्ड्समध्ये असलेली स्वयंचलित उत्पादन संशोधन सुविधा) या आधीच साध्या यंत्रणक्रियांपुरत्या तरी पूर्णपणे स्वयचलित स्वरूपाच्या आहेत. संशोधनाद्वारे या प्रणालींना उत्पादनाच्या सर्व अवस्था हाताळण्याची क्षमता प्राप्त होईल, अशी अपेक्षा आहे.
रोबॉटांचे फायदे व तोटे : रोबॉट धोकादायक कामांपासून मानवाची मुक्तता करू शकतात. मानवाला घाणेरडी, कंटाळवाणी व कमीपणाची वाटणारी कामे रोबॉट करू शकतात. ही कामे ते सुसंगतपणे, न दमता व बिनतक्रार करतील. ते अधिक जड ओझी सातत्याने व स्वतःला इजा न होता उचलू शकतात. ते अतिशय लहान, नाजूक भाग त्यांना न नुकसान पोहोचविता हाताळू शकतात. ॲस्बेस्टस, रंगलेपांच्या वाफा, अपायकारक रसायने व प्रारण (तरंगरूपी उर्जा) यांच्यामुळे धोकादायक बनलेल्या क्षेत्रात रोबॉट काम करू शकतात. ते उष्ण, थंड व अंधाऱ्या परिस्थितीतही काम करू शकतात. रखवालदार, आग व घरफोडी यांचे धोकासूचक, परिक्षक व संनियंत्रक म्हणून ते कठोरपणे, विश्वासूपणे व अविश्रांत काम करू शकतात. काही बाबतींत म्हणजे त्यांना सुट्या, विश्रांतिकक्ष, उपहारगृहे वगैरेंची आवश्यकता नसल्याने ते माणसांपेक्षा कमी खर्चिक असतात. त्याना सहजपणे व जलद प्रशिक्षण देता (म्हणजे त्यांचे कार्यक्रमण करता) येते आणि बदलत्या गरजांनुसार लवचिक व अनूकूल होण्यासाठी पुन्हा प्रशिक्षण (पुनःकार्यक्रमण) देता येते. एखादे काम केल्यानंतर ते दुसऱ्या कामाकरिता वापरता येतात. त्यांच्या उपयुक्ततेवर फक्त त्यांचा वापर करणाऱ्याच्या गरजा व कल्पनाशक्ती यांच्यामुळेच मर्यादा येऊ शकतात.
रोबॉटांच्या सध्याच्या क्षमता मानव व उच्च-वेगी समर्पित (विशिष्ट उपयोगी बांधील असलेले) यंत्र यांच्या दरम्यान आहेत. रोबॉट हे काही बाबतींत मानवाइतके चांगले परिणामकारक नाहीत. उदा. उच्च गोंगाटाच्या पार्श्वभूमीवरील उद्दीपने ग्रहण करणे, विविध वा जटील असलेले आकृतिबंध ओळखणे, नविन समस्या सोडविण्याकरीता पूर्वानुभवाचा उपयोग करणे, नविन कार्यक्रमणाची आवश्यकता न पडता आणीबाणीच्या वेळी योग्य क्रिया करणे, मोडतोड झाली तरी त्यातून पूर्वस्थितीत येणे, नट व बोल्ट यांची जुळणी करणे, ज्याला ‘समज’ किंवा ‘जाण’ आवश्यक असते असे काम करणे, सरावाने अधिक चांगल्या प्रकारे कार्य करणे वगैरे. उच्च-वेगी समर्पित यंत्राशी तुलना करता रोबॉट अधिक मंद, मोठ्या प्रमाणावरील उत्पादनासाठी तितकेसे काटकसरीचे नसलेले आणि तितके मजबूत, टिकाऊ, दृढ व अचूक नसतात.
भावी प्रगती : रोबॉटांचे खास विज्ञान व तंत्रविद्या आता अस्तित्वात आलेली आहेत. रोबॉटांचे उपयोग, अर्थशास्त्र व सामाजिक परिणाम यांच्याशी संबंधित असलेल्या नवनवीन ज्ञानशाखा उदयास येत आहेत. काही अनिष्ट कामांपासून त्यांनी मानवाची सुटकाही केलेली आहे परंतु त्यांच्यामुळे काही कामगारांना कामावरून दूरही व्हावे लागले आहे. ज्याप्रमाणे घोड्याची जागा मोटारगाडीने घेतली त्याप्रमाणे माणसांची जागा रोबॉट घेतील की काय किंवा त्यांच्यामुळे संगणकाप्रमाणे नवीन उद्योग, अधिक नोकऱ्या व अधिक चांगल्या दर्जाचे जीवनमान निर्माण होतील, याचे उत्तर भविष्य काळातच मिळेल परंतु रोबॉटांमध्ये निश्चितपणे प्रगती होईल आणि ते अधिक सांधेयुक्त, मजबूत, अधिक विश्वासार्ह, अधिक बुद्धिमान व कमी खर्चिक होतील. त्यांच्या क्षमतांमध्ये वाढ होईल पण कदाचित काही विशिष्ट क्षमता त्यांच्यापासून रोखून ठेवण्याच्या टप्प्यापर्यंतच ही वाढ होईल आणि या टप्प्यावर मानवात तंत्रविद्येवर नियंत्रण ठेवण्यासंबंधी एकमत होईल.
रोबॉटांची व्याख्या जागतिक पातळीवर निश्चित झालेली नसल्याने त्यांच्या सध्याच्या आकडेवारी विषयी एकमत नाही. एका अंदाजानुसार जगातील खऱ्या औद्योगिक रोबॉटांची संख्या १९८१ मध्ये सु. २३,००० होती. यांपैकी १४,००० जपानमध्ये ५,००० अमेरिकेत व ४,००० प. यूरोपात होते. अमेरिकेतील रोबॉटांपैकी सु. ८०% धातुकाम उद्योगात वापरले जात होते. सु. ३०% सहा कंपन्यांकडे होते व यांतील तीन कंपन्या मोटरगाडी उद्योगातील होत्या. १९९० पावेतो जगातील रोबॉटांची संख्या १,१५,००० पर्यंत पोहोचेल, असा अंदाज आहे.
भारतात मुंबई येथील मेकेलॉनिफ वेल्डर्स या खाजगी क्षेत्रातील कंपनीने प्रामुख्याने वितळजोडकामासाठी उपयुक्त असा द्रवीय-चलित रोबॉट १९८२ च्या सुमारास तयार केला. या रोबॉटाची क्षमता २ मी. त्रिज्येच्या अर्धवर्तुळाकार कार्यावकाशातील ४० किग्रॅ.पर्यंत वजन हाताळण्याची होती. भारत इलेक्ट्रॉनिक्स या सार्वजनिक क्षेत्रातील कंपनीने दूरचित्रवाणीतील चित्रनलिकांच्या जुळणीसाठी ‘उचलण्या-ठेवण्याच्या’ प्रकारचा व सूक्ष्मप्रक्रियकाद्वारे नियंत्रित केलेला रोबॉट तयार केला आहे. मुंबई येथील इलेक्ट्रोन्यूमॅटिक्स अँड हायड्रॉलिक्स (इंडीया) या खाजगी क्षेत्रातील कंपनीने द्रवीय व विद्युत् शक्तीवर चालणारे विविध कामांकरिता (उदा., इलेक्ट्रॉनीय घटकांची जुळणी, रंग फवारणे, वितळजोडकाम) उपयुक्त असे रोबॉट तयार केलेले आहेत. यांखेरीज हिंदुस्थान मशीन टूल्स (बंगलोर), जयहिंद सायाकी (चिंचवड, पुणे) व सील्फेक्स ऑटोमेशन अँड रोबॉटिक्स कंपनी (मद्रास) या कंपन्या विविध प्रकारांचे रोबॉट तयार करतात.
पहा : दूरवर्ती नियंत्रण प्रणाली नियंत्रण प्रणाली संगणक संश्लेषित बुद्धिमत्ता सेवा-यंत्रणा सूक्ष्मप्रक्रियक स्वयंचालन.
2. Ayers, R. V. Miller, S. M. Robotics : Applications and Social Implications, 1983.
3. D’Ignario, Working Robots, 1982.
4. Groover, M. P. and others, Industrial Robotics Technology, Programming and Applications, 1986.
5. Hunt, U. D. Smart Robots : A Handbook of Intelligent Robotic Systems, 1985.
6. Minsky .M., Ed., Robotics, 1985.
7. Snyder, W. E. Industrial Robots, : Computer Interfacing and Control, 1985.
8. Ste. Croix, Philip de, Ed., Robots, London, 1985.
गोसावी, वि. पां . भदे, व. ग.



“